微型虚拟现实头部跟踪系统的设计
摘要:头部跟踪系统是虚拟现实系统中的关键部分之一,它的任务是检测头部的姿态与方位。设计一种基于两轴磁阻效应传感器和三轴MEMS加速度传感器的微型虚拟现实头部跟踪系统,首先阐述了系统的基本原理及整体构成,其次给出了硬件设计以及头部方位、姿态求解的算法;最后,给出了系统的运行效果。结果表明,该头部跟踪系统可实际应用于头部缓慢转动场合.同时具有体积小、功耗低、性价比高的优点。
关键词:磁阻效应传感器;加速度传感器;虚拟现实;头部跟踪系统
0 引言
虚拟现实(virtual reality,VR)技术,亦称灵境技术,是一门由应用驱动的涉及众多学科的新型实用技术,常集计算机技术、传感与测量技术、传真技术、微电子技术等于一体,通过创建一个三维视觉、听觉和触觉的环境,使用户利用人机对话工具,同虚拟环境的物体进行交互操作,使用户仿佛置身于现实环境之中,达到境界虚拟,感觉真实的效果。在现实世界中,有些环境人们难于身临其境或者实现条件过高、费用过大,而虚拟现实却能超越时间与空问、现实与抽象,将各种无法接触的环境再现于人们的面前,为人类发展提供了一个新的途径。目前,虚拟现实已应用于军事、教育、医学、产品设计、科学可视化、训练、建筑、娱乐、艺术等各个方面。
实时交互性是虚拟现实的关键特征。为了实现人与计算机之间的交互,需要使用专门设计的输入/输出设备把用户的命令输入给计算机,同时把模拟过程中的反馈信息提供给用户。这些设备包括大视角的立体显示器、头部跟踪系统、三维声音系统、触觉反馈系统和力反馈系统等。其中跟踪系统是虚拟现实人机交互的关键设备。如果没有跟踪系统,计算机就不能改变空间视图,以配合用户头部的姿态变化,沉浸感也就荡然无存。目前虚拟现实跟踪系统主要有机械跟踪系统、光学跟踪系统、超声波跟踪系统、电磁场跟踪系统等。但较完善的产品价格都很昂贵,对环境的要求比较严格,而且结构比较复杂。利用磁阻效应传感器和MEMS加速度传感器开发的虚拟现实跟踪系统,不仅结构简单、体积小、可靠性高,而且性价比高,适用面广。
1 系统基本原理及整体构成
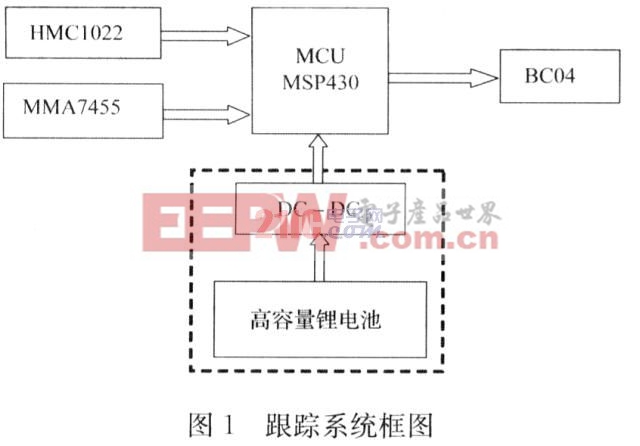
本系统主要由MSP430F149微控制器、两轴磁阻效应传感器HMCl022、三轴MEMS加速度传感器MMA7455、蓝牙模块BC04组成。系统运行时,微控制器以lOO Hz的频率采集磁阻效应传感器和加速度传感器的数据,并计算出用户头部的三维姿态信息,将其通过蓝牙发送到计算机,计算机根据用户头部的三维姿态信息展示相应的视景,使用户所看到视景跟随头部的运动而变化,产生真实的沉浸感。系统整体构成如图1所示。
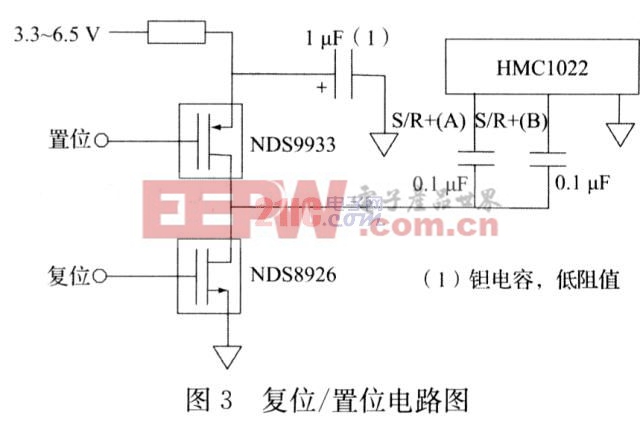
当磁阻效应传感器暴露于干扰磁场中时,传感器元件会分成若干方向随机的磁区域,从而导致灵敏度衰减。环境中的强磁场(大于5×10-4T时)会导致磁传感器输出信号变异,为了消除这种影响并使输出信号达到最佳,就需要应用磁开关技术(SR+/SR-)来抵消剩余磁场,而HMCl022是借助一个偏置磁场以补偿干扰磁场,即通过集成在芯片内部的置位/复位合金带对薄膜施加3~4 A,20~50 ns的脉冲电流就可以重新将磁区域对准,统一到一个方向上,这样可确保高灵敏度和可重复的读数。本系统采用的置位/复位电路能产生大于4 A的强电流脉冲,从而实现低噪声和高灵敏度的磁场测量。复位电路如图3所示,复位置位由单片机的I/O引脚进行控制。


2.4 蓝牙模块
采用重庆金瓯公司设计的BC04蓝牙模块来实现系统与计算机的蓝牙通信。该模块采用CSR公司的BLLIECORE4-External芯片为核心,具有体积小、功耗低等优点。完全遵循蓝牙系统的数据和音频连接。采用USB或UART主设备接口,最高支持3 Mbps的数据速率。本系统中,MSP430单片机通过UART连接蓝牙模块,在与计算机建立蓝牙连接后,即可实现透明数据传输。在保证数据正常传输的情况下,将波特率设置为相对低速而稳定的9 600 bps(bit/s),数据帧为8Nl模式(8位数据位,无校验位,1位停止位)。
3 方位、姿态求解算法
3.1 求解航向角
地磁场磁感应强度大约为50~60μT,与地球表面平行的分量总是指向磁北极。在地平面上利用双轴磁阻效应传感器测定地磁场在磁阻效应传感器的X、Y轴上的分量XH和YH,就可确定在地平面上物体相对于磁北极的方位角φ。设定方位角φ=0时,磁阻效应传感器的X轴指向磁北极(正前方),Y轴指向右侧,方位角φ逆时针为正。根据测定的地磁场分量XH和YH,可计算出方位角φ为:
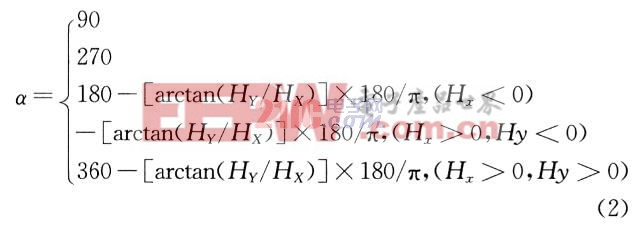
根据XH和YH的符号,可以获得方位角所处的象限,于是可根据式(2)求得正确的方位角:

式中:θ、γ分别为俯仰角和滚转角;AX、AY分别为加速度传感器X
- 传感器融合增强设备性能解析(03-07)
- 应用于聚光太阳能发电的三臂式光跟踪系统说明书(10-28)
- 基于VxWorks目标跟踪系统的接口板设计(06-21)
- 倾角传感器在太阳能光伏跟踪系统的应用(07-23)
- 电源高位跟踪系统的设计(06-09)
- 基于ADSP-BF533的高度跟踪系统(12-29)