基于ADSP-BF533的高度跟踪系统
时间:12-29
来源:互联网
点击:
调频法测距可用于连续波雷达,也可用于脉冲雷达。该高度跟踪系统以ADSP-BF533为核心,结合调频法测距,来完成跟踪空中炮弹飞行轨迹的任务,同时可实现对地面的预报警功能。
1调频测距法
调频测距系统中的发射频率一般按周期性三角波的规律变化,如图1所示。图中,f1是发射机的高频发射频率,ft0是它的平均频率,Tm是ft0变化的周期,fr从目标反射回来的回波频率,它和发射频率的变化规律相同,但在时间上滞后tR(tR=2R/c)。其中R为目标到发射机的距离,c为光速。发射频率调制的最大频偏为±△f,fb为发射和接收信号间的差拍频率,差拍的平均值用fbav表示。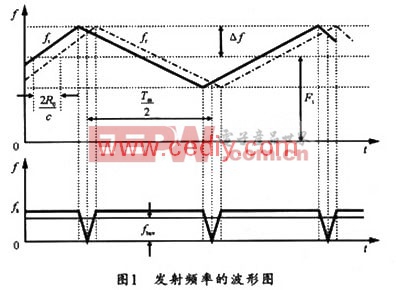

上式中的△f、Tm均为已知,因此,本系统只需提取中频差拍信号频率fbav,便可估算出炮弹离地面的距离。
2系统功能简介
高度跟踪系统是由射频天线和中频控制板两部分组成。本文主要介绍中频控制板部分,其数字化信号处理原理图如图2所示。
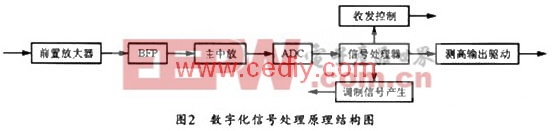 该系统安装在运行炮弹上面,先是接收外部收发控制脉冲触发的发送三角波,然后经信号处理器处理为脉内调制信号,再通过射频模块将所接收的中频差拍信号进行放大、采样、提取频率,最后估算出距离,若该距离超过门限值,则输出报警信号,以实现系统的自动报警功能。
该系统安装在运行炮弹上面,先是接收外部收发控制脉冲触发的发送三角波,然后经信号处理器处理为脉内调制信号,再通过射频模块将所接收的中频差拍信号进行放大、采样、提取频率,最后估算出距离,若该距离超过门限值,则输出报警信号,以实现系统的自动报警功能。3系统硬件设计
该系统中的频控制板部分主要包括电源转换芯片TPS5430和TPS70302、放大器芯片AD2613和两片AD746、A/D转换芯片AD9223、DSP芯片ADSP-BF533、D/A转换芯片AD9762、以及两片驱动芯片74ACT11244。其电路连接如图3所示。
 该系统的系统电源为±12 V,可以直接供给运放AD746。可通过电源转换芯片TPS5430将+12V电平转换为+5 V电平来满足A/D转化芯片、D/A转换芯片、驱动芯片及前前级放大器供电的需要。另外,还可通过TPS70302电源转换芯片将5V电平转换为3.3 V和1.2 V电平来为DSP和FLASH供电。电源转换芯片TPS5430输出电流上门限为3A,可满足系统要求。
该系统的系统电源为±12 V,可以直接供给运放AD746。可通过电源转换芯片TPS5430将+12V电平转换为+5 V电平来满足A/D转化芯片、D/A转换芯片、驱动芯片及前前级放大器供电的需要。另外,还可通过TPS70302电源转换芯片将5V电平转换为3.3 V和1.2 V电平来为DSP和FLASH供电。电源转换芯片TPS5430输出电流上门限为3A,可满足系统要求。该系统输入中频信号为3~10 mV的微小差频信号,因此需将它们放大到可满足A/D转换芯片的输入电平2Vpp左右,需放大40~60 dB。该系统所采用的AD2613为四级放大器,增益分别为25dB、40dB、25 dB、40dB,其中第一级和第三级采用硬件控制其放大倍数,可利用三个放大倍数控制管脚LNP1、LNP2、LNP3,通过不同的相互连通方式,来控制这两级放大器的放大倍数。而第二级和第四级则采用软件控制其放大倍数的方式,通过三个增益控制管脚MGS1、MGS2、MGS3分别与DSP的PF4、PF5、PF6相连,利用软件来控制PF4、PF5、PF6,从而使这两级放大器可以实现8个不同的放大倍数。考虑到放大器实际增益的损耗,文中该系统选用其中的第一级、第二级和第四级,而第三级悬空,这样的放大倍数(25 dB+40 dB+40 dB=105 dB)可充分满足系统要求。另外,因为输入中频信号幅度太小,很容易被淹没在噪声中,因此,放大器每级之间都应加入滤波电路,以保证信号的准确性。
本系统采用的A/D、D/A转换芯片,均为12位高速芯片,可保证系统的实时性和精度。
该系统的数据处理选用Blackfin533,处理器内核包括2个16位乘法器,2个40位的累加器,2个40位的ALU,4个视频ALU和1个40位移位器。处理器内核时钟最高可达600 MHz,片上存储容量为148 kB。本系统采用10 M的晶振,可将内核时钟倍频至400 MHz,其系统时钟为100 MHz。
系统中ADSP-BF533所使用的资源包括2个定时器、DMA控制器、PPI端口和PF端口。系统初始化后,ADSP-BF533首先设置PLL、倍频输入时钟、产生内核时钟和系统外设时钟。然后初始化内部总线和各个需要的端口,其中定时器TIMER0为D/A转换芯片AD9762提供工作时钟,定时器TIMER1为A/D转换芯片AD9223提供工作时钟。
ADSP-BF533处理器可实现以下功能:
(1)中频信号放大:通过PF4、PF5、PF6端口来控制AD2613第二级和第四级的放大倍数。
(2)收发时间控制:产生收发开关控制信号,其宽度为3 ms,重复周期为80~120 ms随机变化;
(3)调制信号产生:通过PPI端口产生三角调制信号,并将其放大到特定幅度及偏置然后做为脉内调制信号传送给天线。
(4)测高处理:完成调频信号差频信号的频谱分析、杂波抑制和输出测高指示信号。
两片AD746为运算放大器,一片用来将D/A产生的三角波放大至7 V,一片用来将预报警开关信号放大至9 V。
4系统软件设计
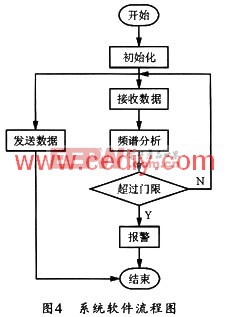
本系统DSP软件使用C语言编写,采用3个中断来完成系统功能。系统初始化后,由PF2端口响应系统发出的收发控制信号,触发PF2中断,在PF2的中断服务程序EX_INTERRUPT_HAN-DLER(PF2_Isr)中使能PPI端口发数,并使能DMA控制3 ms发数时间。其中PPI所发的数是由MATLAB产生两个周期的三角波数据,并归一化使之成为0-4096之间的无符号整数,然后放人提前声明的缓存sPPI_TxBuffer中。一旦DSP接收到了数据就触发TIMER1中断,在TIMER1的中断服务程序EX_INTERRUPT_HANDLER(TIMER1_Isr)中将所接收到的数据写入TIMER1_RxBuffer1,当接收满1024个点时,就触发软中断,然后在软中断的中断服务程序EX_INTERRUFT_HANDLER(FFT_Isr对该1024个点的数据进行FFT运算,估计其频谱,最后由频谱估算出距离。若测算出的距离小于200 m,则将PF3至高,信号再经放大后,可作为输出预报警开关电平。图4所示是发送连续波时的DSP软件流程图。
- 基于ADSP-BF561的宽带信息终端设计(09-24)
- 一文读懂10/25/100G时钟设计的解决方案(09-10)
- 应用于聚光太阳能发电的三臂式光跟踪系统说明书(10-28)
- 基于VxWorks目标跟踪系统的接口板设计(06-21)
- 倾角传感器在太阳能光伏跟踪系统的应用(07-23)
- 电源高位跟踪系统的设计(06-09)