扭矩测量
扭矩测量
扭矩由力和力臂的乘积来定义,单位是Nm。扭矩的测量以测量转轴应变和
测量转轴两横截面相对扭转角的方法最常用。
10.2.1应变式扭矩测量
由材料力学知,当受扭矩作用时,轴表面有最大剪应力τmax。轴表面的单
元体为纯剪应力状态,在与轴线成45度的方向上有最大正应力σ1和σ2,
其值为|σ1|=|σ2|=τmax。相应的变形为ε1和ε2,当测得应变后,
便可算出τmax。测量时应变片沿与轴线成45°的方向粘贴。
若测得沿45°方向的应变ε1,则相应的剪应变为
(10.19) |
式中:
E—材料的弹性模量;
μ—材料的泊松比;
于是,轴的扭矩为
(10.20) |
式中:
Wn—材料的抗扭模量。
对于实心圆轴
(10.21) |
测扭时,电阻应变计须沿主应变ε1及ε2的方向(与轴线成45°及135°夹角)。应变计的布置及组桥方式应考虑灵敏度、温度补偿及抵消拉、压及弯曲等非测量因素干扰的要求
扭矩测量信号的传输
1. 扭矩测量的集电装置
旋转件如转轴的应变测量,需要解决信号传送的问题。粘贴在旋转件上的应变片和电桥导线随旋转件转动,而应变仪等测量记录仪器是固定的。除采用遥测方式以外,需要有集电装置。
集电装置由两部份组成:与应变片相连,随旋转件转动的集流环(滑环)和与外部测量仪器相连,压靠在滑环上的电刷(拉线)。集流装置应准确可靠地传递应变信号,防止干扰减少测量误差。集流环与电刷之间接触电阻的变化是产生干扰,影响正常测量的主要因素(对集电装置的一般要求)。
集电装置种类、形式很多,其原理、结构与电机的集电装置相同。常用的集电装置有
拉线式和电刷式两种形式
2. 无线传输方式
无线传输方式可以克服有线传输的缺点,得到越来越多的应用。它分为电波收发方式和光电脉冲传输方式。这两种方式从使用的角度来看都取消了中间接触环节,导线和专门的集流装置。电波收发方式测量系统要求可靠的发射、接收和遥测装置,且其信号容易受到干扰;而光电脉冲测量抗干扰能力较强,它是把测试数据数字化后以光信号的形式从转动的测量盘传送到固定的接收器上,然后经解码器后还原为所需的信号。
扭矩的测量 (二)
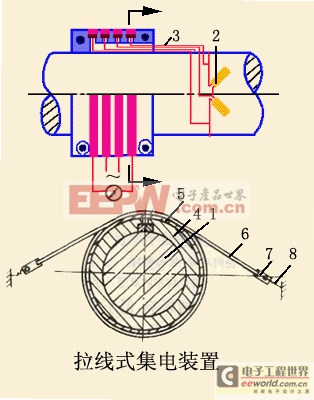
拉线式集电装置
拉线式集电装置的结构如左图( 拉线式集电装置),将两个半圆形尼龙滑环4用螺栓9固定在转轴上。滑环的外圆加工有4条沟槽,槽内嵌有黄铜或铍青铜带5。两个半圆形滑环上的4条铜带端部对头焊接,并将转轴上粘贴的应变片电桥端点引线焊接至该处。拉线6置于滑环之上,并经绝缘子7用弹簧8拉紧固定,在拉线6上焊接引线连至测量仪。拉线6多采用裸钢丝编织扁线(从屏蔽电缆线上剥离下的屏蔽网)。(安装拉线式集电装置的注意事项 )
安装拉线式集电装置的注意事项
(1) 固紧滑环,不得有任何松动,滑环的四个滑道特别是端头焊点应光滑平整,滑环平面与转轴严格垂直。
(2) 若拉线在转轴上的包角太小,转轴会有径向跳动而脱离接触,包角太大会加剧磨损,一般应使包角在30°~90°之间。
(3) 拉线弹簧张力太小,则接触电阻加大甚至接触不好;张力太大,则磨损过快。要适当调整弹簧张力。
(4) 为减少磨损,常在滑道上加入少量凡士林或与石墨碳刷粉末混合物。
(5) 拉线固定方式应视现场条件而定。对于高速转轴或正反换向转轴应双端固定。
电刷式集电装置
电刷式集电装置的结构如左图(电刷式集电装置)所示。为了保证电刷与滑环接触良好,减少接触电阻,在每条滑道上应对称配置多个并接在一起的电刷,且使各电刷用弹簧压紧滑道。其压紧力应适当,一般应在0.2~0.6MPa。电刷材料多用含银石墨,也可用铍青铜片。
其它扭矩测量方法
1. 压磁式扭矩传感器(压磁式扭矩测量的原理)
压磁式扭矩传感器结构如下图,它是利用轴受扭时材料导磁率的变化测量扭矩。其特点是可以非接触测量,使用方便,但要求旋转过程不出现径向跳动,否则铁芯与转轴间隙改变,会造成测量误差甚至破坏测量设备。
2. 磁电感应式扭矩传感器(磁电感应式扭矩传感器的原理)
磁电感应式扭矩传感器结构如下图,它是在转轴上固定两个齿轮,通过其所在横截面之间相对扭转角来测量扭矩。
3. 光电式扭矩传感器(光电式扭矩测量的原理)
光电式扭矩传感器结构如下图,它是在转轴上固定两只圆盘光栅,通过两光栅之间相对扭转角来测量扭矩。
光电式扭矩传感器
如左图(光电式扭矩传感器)所示,在转轴4上固定两只圆盘光栅3,在不承受扭矩时,两光栅的明暗区正好互相遮挡,光源1的光线没有透过光栅照射到光敏元件2,无输出信号。当转轴受扭矩后,转轴变形将使两光栅出现相对转角,部份光线透过光栅照射到光敏元件上产生输出信号。扭矩愈大,扭转角愈大,穿过光栅的
- 基于LabWindows CVI的扭矩扳手数据处理系统的设计与实现(10-16)
- 应用扭矩振动研发旋转机械轴裂纹的检测(12-28)
- 阀控铅酸蓄电池的失效探讨及在线监测(01-06)
- 运算放大器电路固有噪声的分析与测量(第二部分):运算放大器噪声介绍(05-12)
- 运算放大器电路固有噪声的分析与测量(第二部分):运算放大器噪声介绍(二)(05-12)
- 功率测量技术及其应用(11-04)