存在串扰时的抖动和定时分析
设备上,如频谱带有假信号的等效时间采样示波器,串扰表现为连续的噪声。 在实时采样示波器和等效时间采样示波器中,这些基于频谱的抖动分析技术都通过对连续抖动频谱求积分来测量随机抖动(RJ),由于串扰定时效应而夸大RJ.这会导致RJ提高,高估TJ.图4显示了示波器测量的抖动,在本例中,示波器测量的DUT拥有大量的串扰。 串扰在示波器中表现为有界不相关抖动或BUJ,因为它采用有界分布。数据码型的复杂性会使分布的有界特点变得模糊。1和0似乎随机的分布会导致在每个侵入信号跳变上传送不同数量的电压噪声。 对串扰引起的BUJ的灵敏度在不同测量系统之间而不同。示波器在测量或推断抖动时,会悲观地把BUJ或NP-BUJ捆绑到RJ中,然后还会高报TJ.抖动结果(RJ,TJ)主要取决于侵入信号码型复杂性,PRBS31最差,而PRB7一般不会导致大的误差。在实时示波器中,RJ和TJ结果还取决于记录长度,记录长度越长,提供的样点越多,抖动分离能力越好。这一问题的具体机制还与实现方案有关。 BUJ测量解决方案目前,在怀疑存在串扰时,有许多方法进行抖动分析,但没有一种方法能够像示波器为DDJ和PJ提供的结果那样,提供单键测量结果。一条线索是抖动分析仪器报导的RJ测量结果是不是异常大。热效应、也是RJ的最终成因,很少会超过3 ps RMS.如果报告的RJ大于3 ps,那么可能是串扰导致了问题。 识别串扰的其它技巧要求更多地控制侵入信号信道。例如,如果有可能关闭怀疑的侵入信号,那么可以比较侵入信号信道上有信号和没有信号时的RJ测量数据。如果有侵入信号的RJ大于没有侵入信号的RJ,那么串扰就是问题。解决方案是在Dual-Dirac模型中使用侵入信道关闭时测量的RJ及侵入信道打开时测量的双Dirac DJ,来估算相关BER下的总抖动。这种方法的问题在于,它要求控制侵入信号,而并非一直可能实现。另一个问题是它在非线性系统中是无效的(大多数发射机是非线性系统),其对误差持乐观态度,因为部分串扰是无界的。 更加先进的方法是实现识别BUJ的抖动分析算法,这涉及在分隔DDJ和PJ之后在抖动分析中增加一个额外步骤,把NP-BUJ与RJ分开,如图5所示。一个关键优势是这适用于每个场景,因为它不需要控制侵入信号,非线性TX不会带来问题。此外,无界串扰成分将正确识别为无界。这种方法的缺点是结果仍有一些悲观。 为测试抖动分析算法把BUJ与其它随机抖动来源准确分开的能力,我们重复图4所示的测试,但增加了等效时间采样示波器采用识别BUJ的抖动分析算法提供的结果。图6中虚线表示的结果与BERT相比仍有些悲观。实时示波器得到的结果还要更悲观一些。也就是说,报告的TJ误差精度大幅度改善,即使在怀疑的串扰可能会导致抖动和噪声相关误差时,仍有可能相信示波器的TJ测量。 小结随着数据速率不断提高,抖动已经占到信令间隔中非常大的比重,设计人员全面了解设计中抖动类型和抖动来源越来越重要。由于大多数高速串行设计现在涉及多条通路,串扰几乎是不可避免的结果,在抖动预算中必须考虑串扰。 但到目前为止,使用抖动分离技术一直很难测量串扰引起的抖动或有界不相关抖动的影响。由于抖动算法没有考虑BUJ,因此BUJ一直与RJ归并在一起,与BER测试仪获得的结果相比,得到的是悲观的总抖动结果。 正是认识到这种日益增长的问题,特别是对10 Gb/s以上的数据速率,抖动模型正在扩展到包括BUJ,并增加识别BUJ的算法。在涉及大量串扰的测试中,实践证明,新模型可以在实时示波器和等效时间采样示波器上有效提供TJ结果,并与BERT得到的结果一致。它还可以更加全面地分析设计中的抖动问题,包括串扰引起的抖动。 更多资讯请关注:21ic模拟频道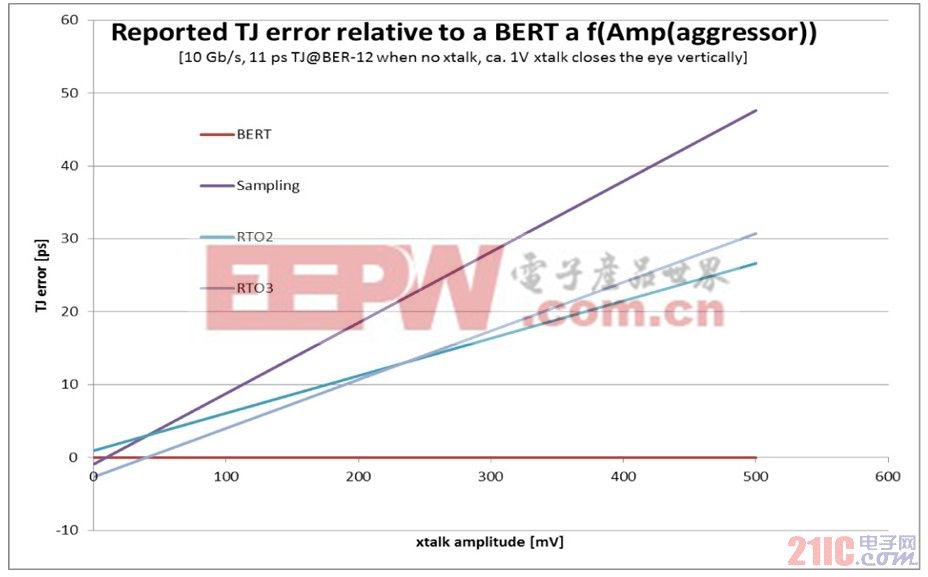
图4 与BERT相比,示波器中的TJ误差。(注: RTO = 实时示波器,采样 = 等效时间示波器)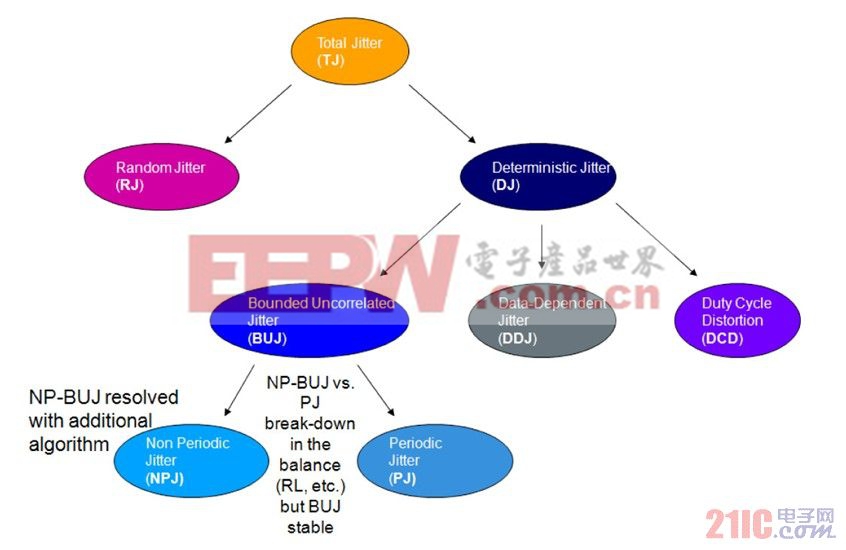
图5 识别BUJ的抖动分析及得到的抖动分解地图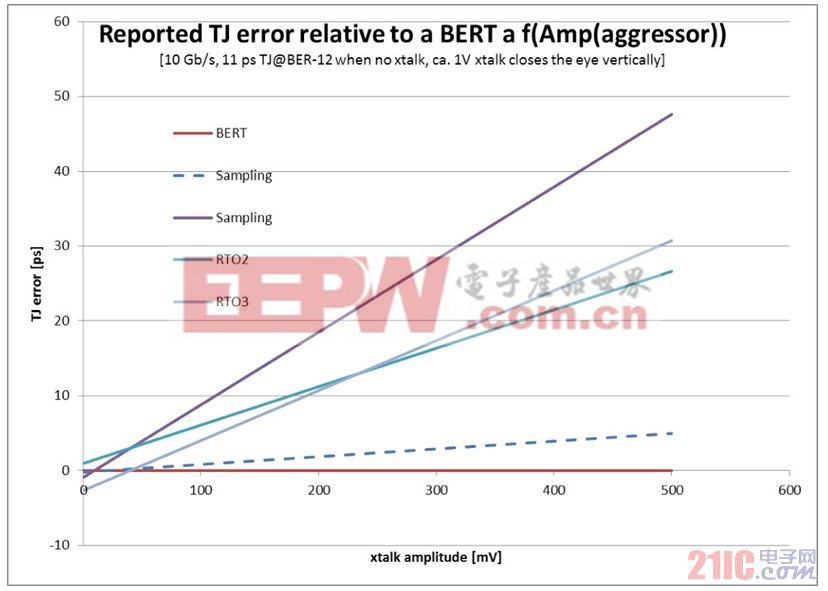
图6 识别BUJ的抖动分析(虚线)算法显示具有大量串扰的DUT上的精度明显改善
- RJ45双绞线水晶头的制作(04-26)
- 24位低功耗模拟前端-ADS131E08 解决方案(07-29)
- 指状电源和地线之间的串扰(08-04)
- 完整地平面的串扰分析(06-22)
- 平行交叉地平面的串扰(06-26)
- 开槽地平面的串扰(06-26)