工程师制作故事:手工制作光能转动机器人
本项目介绍的是与之前几个项目的机器人一样,同样是采用太阳能脉动充放电控制电路。通过这些项目,我们可以再了解一种新的机器人驱动方式。

本项目机器人可以看成一个“太阳能风车”,风车转动的能量是风能,而“太阳能风车”转动的能量却是太阳能——有太阳的时候会转动,把太阳能转变为动能。本项目采用的同样是与之前几个项目一样的脉动充放电控制电路,运行的效果就是晒一会太阳充会电,然后转动一会,太阳越大转动越快;如果太阳足够火辣则可以几乎连续转动而中间没有停顿,而且这个时候会产生较大的震动,机器人整体也会发生移动,这有点类似2号蚊子的移动方式,看来作为亲戚还是有不少地方的相似的,呵呵。
1基本原理
本项目的机器人采用太阳能电池作为电源,驱动电机带动一个转轴进行转动。
1.1驱动原理
本项目机器人的驱动原理很简单,就是驱动电机旋转的传动方式,不过和通常的应用有点区别:一般的电机传动结构,电机是固定的,电机的轴是旋转的;而本项目的结构是正好相反,电机的轴是固定的,电机本身却是旋转的——电机的轴是固定在底座的,而电机和太阳能电池板、以及控制电路等都是和电机绑定在一起可以转动的,就是说除了一个固定的底座,其他部分都会跟着一起旋转。
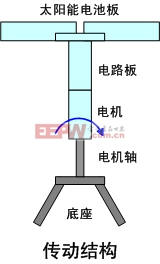
1.2机械结构
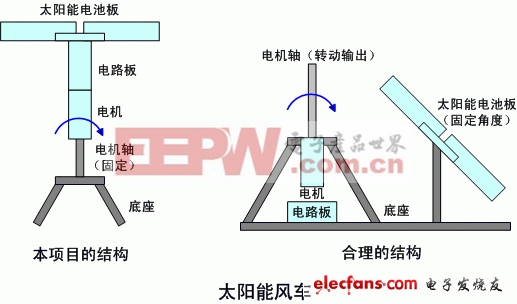
本项目采用的“电机轴固定、而电机本身旋转”的机械结构,其实效率并不如果“电机本身固定,而电机轴旋转”,毕竟这样电机转动时除了负担实际的负载之外,还要负担电机本身的重量。实际应用时一般不会采取这种方式,如果真的是作为太阳能风车,合理的方式应该是尽可能的减少驱动的负载,除了电机和控制电路等应该固定在底座不要跟着转动之外;同时还应该考虑太阳能电池板的安装角度,尽可能对着太阳以充分获得太阳能;实在不行至少应该固定太阳能电池板的安装角度,不至于说获得太阳能会那么不稳定(转到对着太阳的角度则效率高转得快,转到背着太阳的角度则效率低转得慢)。
本项目机器人之所以采用这样传动方式,主要是为了增加一个趣味性的效果,同时也作为介绍一种新驱动方式来拓宽视野而已。
此外,对于本项目机器人,让电机本身也一起转动,可以增加转动时整体的动能,让转动时产生的震动更大,而底座相对接触地面的面积尽可能小一点,就可以在转动速度比较快的时候机器人整体也会进行移动,而这个时候本项目也不再仅仅是一个固定的太阳能风车,而可以称得上是一个会移动的机器人(见视频中在灯光下快速转动时的效果),当然这个移动效果也不明显,效率也不高,所以本项目可以说有点不伦不类——低效率的太阳能风车,或低效率的移动机器人,可以说作为一种反面教材普及相关知识而已。
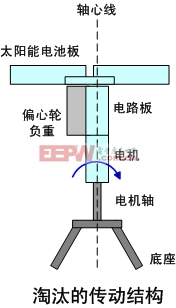
如果说作为移动机器人,为了让移动的效果更明显,就要增加转动时产生的震动。要产生更大的震动,除了说转动时带动更重的负载外,可以考虑用偏心轮的结构,就是说把除了电机上的其他绑定的负载(太阳能电池板、电路板等)都装在电机的一侧,而不是与电机同轴的位置,这个原理详见PVC-Robot 2号机器人的震动马达的原理(具体见:晒太阳的蚊子·光能电机昆虫的移动原理)。
不过,如果采用偏心轮的效果,会造成电机转动时的负载过大(转不动),在普通强度的太阳光下太阳能风车的效果就不是很好——转动太慢,转动角度太小。本项目机器人早期有一个设计版本就是属于偏心轮的结构,后来为了兼顾太阳能风车的效果(太阳不大的情况下也能转动得比较顺)所以被淘汰了。

新旧版本对比(左旧--右新)
另外,本项目如果从移动机器人来看,为了增加移动效果,还可以把底座的四只脚都装上一个小轮子,这样转动时产生的震动就可以让机器人移动的幅度更大,可以说这作为本项目机器人的扩展装备。

1.3电路原理
本项目的电路与PVC-Robot 2号机器人项目的电路是一摸一样的,电路原理也是一摸一样的——典型的脉动充放电控制电路。
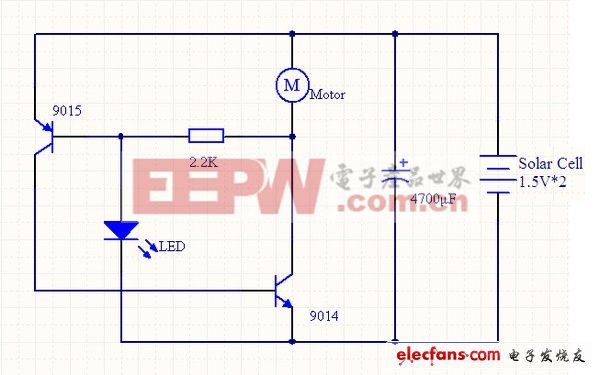
基本原理如下:
1)太阳能电池板给电解电容充电,电解电容两端的电压不断上升;
2)当电路电压达到LED二极管的导通电压(2V左右)时,LED二极管导通;
3)三极管9015的基极从导通的LED二极管获得足够的导通电压,则三极管9015导通;
4)三极管9015导通后,又使三极管9014的基极获得足够的导通电压,则三极管9014导通;
5)三极管9014导通后,电机获得电流开始转动;
6)电机转动,消耗电解电容中存储的电能,电路电压下降;
7)当电路电压下降到低于LED二极管的导通电压时,LED二极管截
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)