基于TMPM374和IPD的变频冰箱参考方案
态下马达还未处于矢量控制反馈下,而是人为的强制加入旋转磁尝马达的转子受磁力的影响,跟随该旋转磁场进行物理旋转。当旋转的角速度值达到最低频率时,马达进入下一状态。
4、強制→稳定的切换(Change_up)状态:马达进行从强制运转切换至稳定状态的处理。当马达转子加速后进入稳定的转速后,进入下一状态。
5、稳定(Steady_A)状态:按照转子的位置和马达目标速度进行驱动。
寄存器配置
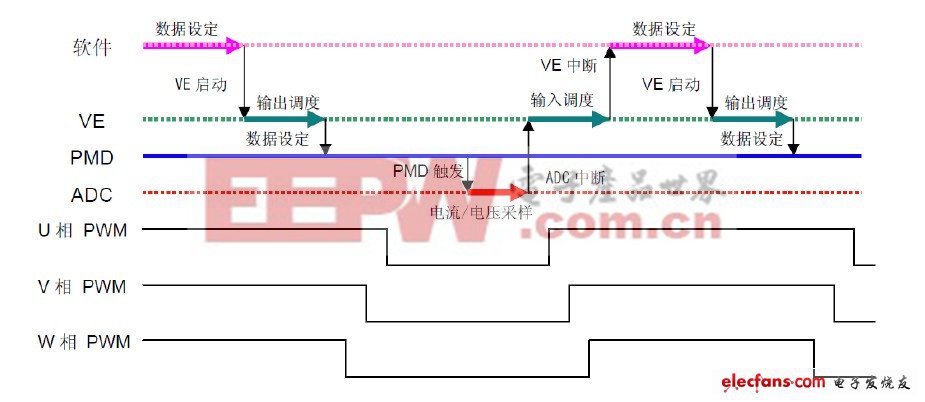
图 5 VE、PMD、ADC 的工作时序。
如图5,启动马达前我们需要分别对ADC、VE、PMD 模块的寄存器进行配置。在ADC 中,需要配置采样通道、ADC 采样时钟、采样完成后通知VE 响应中断。为了同步PMD 模块的PWM 信号,我们需要配置ADC 采样允许PMD 同步触发转换。这里需要注意的是VE 将空间矢量划分为6 个60°的扇区,分别对应ADC 的不同采样通道,由于我们使用的是3 电阻的采样方式,因此需要配置触发来执行输出。根据VE 触发器的生成任务将VE 扇区信息(VESECTORn)自动传送给PMD 程序的触发输出选择寄存器(VETRGSELn)。
在PMD 中模块设定中,由于包含了脉宽调制电路、PWM 控制电路、保护控制电路、死区控制电路,因此相应的软件需要配置PWM 周期及占空比、PWM模式(三角波或锯齿波)、PWM 输出方式、关断模式、死区时间、输出端口极性(High/Low 有效)、保护控制(EMG、OVV)。
在VE 的设定中,需要配置任务调度、d 轴电流环的PI 积分系数和比例系数、q 轴电流环的PI 积分系数和比列系数。
当初始化设置完成后启动VE,使VE、ADC 和PMD 三方协作工作。每当VE的输入调度完成后,将会产生一次VE中断,通过对中断的响应刷新任务调度器即可实现电机的控制。
4 总结
基于东芝TX03 系列的变频方案最大的特点是VE 矢量引擎的硬件化,减少了大量的软件算法及计算运算时间,极大的提高了处理器的执行能力,在满足电机控制的同时并富有大量的运算结余可以用于其它需求。
在电机磁场控制(FOC)硬件化后,也同样提高了控制系统的稳定、可靠性。
同时由于矢量控制引擎(VE)的模块化结构,也使得用户可以自由选择使用或不使用其部分运算模块的功能,使繁琐的电机控制器系统变成通过软件配置灵活的管理任务调度器 实现电机磁场控制,极大的缩短了产品设计周期,加速产品上市时间。
- 以创新的IGBT技术、合理的器件选型和有效的系统手段优化变频器设计(01-09)
- 变频电源系统原理(01-02)
- 变频电源的优势和应用(04-28)
- 交—交变频低频电源的研发与应用(05-26)
- 台达变频器在数控机床的应用(06-29)
- 基于IM14400的三相正弦波变频电源设计(10-21)