台达变频器在数控机床的应用
时间:06-29
来源:电子技术应用
点击:
一、简介
数控机床的技术水平高低及其在金属切削加工机床产量和总拥有量的百分比,是衡量一个国家国民经济发展和工业制造整体水平的重要标志之一。数控车床是数控机床的主要品种之一,它在数控机床中占有非常重要的位置,几十年来一直受到世界各国的普遍重视,并得到了迅速的发展。主轴是车床构成中一个重要的部分,对于提高加工效率,扩大加工材料范围,提升加工质量都有着很重要的作用。经济型数控车床大多数是不能自动变速的,需要变速时,只能把机床停止,然后手动变速。而全功能数控车床的主传动系统大多采用无级变速。目前,无级变速系统主要有变频主轴系统和伺服主轴系统两种,一般采用直流或交流主轴电机。通过带传动带动主轴旋转,或通过带传动和主轴箱内的减速齿轮(以获得更大的转矩)带动主轴旋转。由于主轴电机调速范围广,又可无级调速,使得主轴箱的结构大为简化。目前对客户来说由于变频器的高性价比,所以变频器在车床上使用非常普遍。台达M系列变频器以其独特的性能和优越的性价比,在数控机床的应用上迅速崛起,成为目前市场上一支强大的生力军。
二、变频器特点的介绍
1.体积小,属于迷你型产品,占用控制柜空间较小;
2.控制方式为正弦波SPWM(提供无速度反馈矢量控制),控制性能较以前的VF控制方式有很大性能上的改善,特别是在低速转矩上满足机床主轴的需求,5HZ时起动转矩能够达到150%以上;
3.载波频率范围0-15KHz,减小电机的电磁噪音;
4.提供标准的0-10V模拟量接口(输入阻抗47Kohm,输出阻抗250Kohm),能够与大多数数控系统接口兼容,通用性强;
5.过负载能力强,150%以上额定输出电流超过一分钟;
6.提供多功能的输出端子信号,例如零速信号,运转中信号,速度到达信号,故障指示,满足系统对于主轴速度状态的监控;
7.自动转矩补偿,满足机床主轴在低速情况下的加工需求;
8.提供三组异常纪录,供维修人员从侧面了解机床主轴实际的运行状况;
9.电机参数自动整定功能,在线识别电机参数,保证系统的稳定性和精确性。
三、调试环境以及接线、调试方法
客户选配电机为3.0KW/50Hz/380V,选用变频器型号为VFD037M43,制动电阻400W/150ohm。
变频器AVI/GND端子提供与数控系统速度模拟量,AVI接数控系统模拟量接口正信号,GND接负信号,信号为0-10V模拟电压信号,控制主轴转速。M0/M1/GND为变频器的正转/反转信号端子,通常由数控系统发出正转信号FWD或者反转REV,来驱动中间继电器,中间继电器的常开接点接入变频器M0/GND或者M1/GND,从而控制变频器的正反转。
在参数调整过程中,需要注意:
1.P00参数为选择主频率输入设定来源,设置为模拟信号0-10V输入(1);
2.P01参数为运转信号来源设定,设置为外部端子信号控制(2);
3.P03最高操作频率选择,对应于模拟信号10V输入时变频器的输出频率,由于是在0-3500rpm范围内调速,将机械减速比这算进去以后,此参数需要设置为184HZ;
4.P04和P05按照电机铭牌设置,P04=50Hz,P05=380V;
5.P10和P11为加速时间和减速时间,根据客户的要求,P10=5S,P11=5S;
6.P105为控制方式的选择,需要选择矢量控制,P105=1;
特别需要注意,由于矢量控制需要提供电机参数(阻抗),变频器提供电机参数自整定功能P103,选择P103=2,通过面板运行键,变频器会自动运行。自动运行过程中,除了计算出电机参数以外,还能够检测出空载电流,这几个参数对于矢量控制能够表现出较高的性能非常重要,这个过程会持续十几秒钟时间。在执行自整定功能前,一定要确认电机侧是否没有任何连接,包括减速皮带。
四、调试结果
测试结果如下:
数控机床的技术水平高低及其在金属切削加工机床产量和总拥有量的百分比,是衡量一个国家国民经济发展和工业制造整体水平的重要标志之一。数控车床是数控机床的主要品种之一,它在数控机床中占有非常重要的位置,几十年来一直受到世界各国的普遍重视,并得到了迅速的发展。主轴是车床构成中一个重要的部分,对于提高加工效率,扩大加工材料范围,提升加工质量都有着很重要的作用。经济型数控车床大多数是不能自动变速的,需要变速时,只能把机床停止,然后手动变速。而全功能数控车床的主传动系统大多采用无级变速。目前,无级变速系统主要有变频主轴系统和伺服主轴系统两种,一般采用直流或交流主轴电机。通过带传动带动主轴旋转,或通过带传动和主轴箱内的减速齿轮(以获得更大的转矩)带动主轴旋转。由于主轴电机调速范围广,又可无级调速,使得主轴箱的结构大为简化。目前对客户来说由于变频器的高性价比,所以变频器在车床上使用非常普遍。台达M系列变频器以其独特的性能和优越的性价比,在数控机床的应用上迅速崛起,成为目前市场上一支强大的生力军。
二、变频器特点的介绍
1.体积小,属于迷你型产品,占用控制柜空间较小;
2.控制方式为正弦波SPWM(提供无速度反馈矢量控制),控制性能较以前的VF控制方式有很大性能上的改善,特别是在低速转矩上满足机床主轴的需求,5HZ时起动转矩能够达到150%以上;
3.载波频率范围0-15KHz,减小电机的电磁噪音;
4.提供标准的0-10V模拟量接口(输入阻抗47Kohm,输出阻抗250Kohm),能够与大多数数控系统接口兼容,通用性强;
5.过负载能力强,150%以上额定输出电流超过一分钟;
6.提供多功能的输出端子信号,例如零速信号,运转中信号,速度到达信号,故障指示,满足系统对于主轴速度状态的监控;
7.自动转矩补偿,满足机床主轴在低速情况下的加工需求;
8.提供三组异常纪录,供维修人员从侧面了解机床主轴实际的运行状况;
9.电机参数自动整定功能,在线识别电机参数,保证系统的稳定性和精确性。
三、调试环境以及接线、调试方法
客户选配电机为3.0KW/50Hz/380V,选用变频器型号为VFD037M43,制动电阻400W/150ohm。
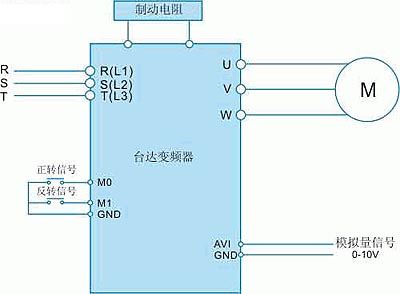
变频器AVI/GND端子提供与数控系统速度模拟量,AVI接数控系统模拟量接口正信号,GND接负信号,信号为0-10V模拟电压信号,控制主轴转速。M0/M1/GND为变频器的正转/反转信号端子,通常由数控系统发出正转信号FWD或者反转REV,来驱动中间继电器,中间继电器的常开接点接入变频器M0/GND或者M1/GND,从而控制变频器的正反转。
在参数调整过程中,需要注意:
1.P00参数为选择主频率输入设定来源,设置为模拟信号0-10V输入(1);
2.P01参数为运转信号来源设定,设置为外部端子信号控制(2);
3.P03最高操作频率选择,对应于模拟信号10V输入时变频器的输出频率,由于是在0-3500rpm范围内调速,将机械减速比这算进去以后,此参数需要设置为184HZ;
4.P04和P05按照电机铭牌设置,P04=50Hz,P05=380V;
5.P10和P11为加速时间和减速时间,根据客户的要求,P10=5S,P11=5S;
6.P105为控制方式的选择,需要选择矢量控制,P105=1;
特别需要注意,由于矢量控制需要提供电机参数(阻抗),变频器提供电机参数自整定功能P103,选择P103=2,通过面板运行键,变频器会自动运行。自动运行过程中,除了计算出电机参数以外,还能够检测出空载电流,这几个参数对于矢量控制能够表现出较高的性能非常重要,这个过程会持续十几秒钟时间。在执行自整定功能前,一定要确认电机侧是否没有任何连接,包括减速皮带。
四、调试结果
测试结果如下:
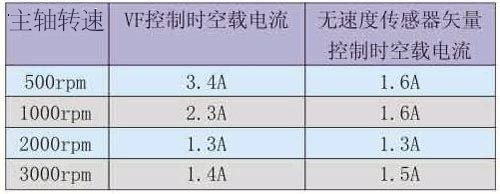
表1 空载电流测试结果
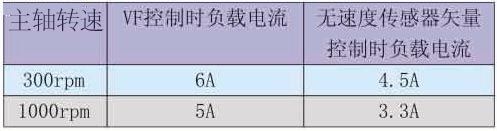
表2 负载电流测试结果
从上表可以看出在恒转矩输出的频率段(0-50Hz),矢量控制的空载电流几乎只有VF控制的一半,负载时电流也比VF小一些;而且负载切削时,VF控制在初期有很明显的速度下降,而且空载速度和负载速度有比较大的差值。而相对于矢量控制,主轴转速初期虽然也会有下降,但是下降值较小,并且速度会很快回升,最终空载速度和负载速度相差不是很明显。经过上面的调试,相比较原来的VF控制,性能有了很大的改善,无论从空载电流,低速力矩,还是速度的变化,效果都是非常明显的,完全能够满足数控机床的需求。
- 以创新的IGBT技术、合理的器件选型和有效的系统手段优化变频器设计(01-09)
- 用薄膜电容器替代铝电解电容器的分析与实践(04-20)
- 关于变频器输出端连接开关的探讨(06-20)
- 基于台达变频器的EPS解决方案(07-29)
- 高性能V/f控制在中压变频器中的实现(07-08)
- 浅谈交流变频器系统的抗干扰性和干扰性(10-20)