一种基于线性化直升机数学模型的仿真系统
时间:10-16
来源:互联网
点击:
、尾桨、机身、平尾、垂尾、发动机和飞控系统等部件进行建模,并最终综合成一个完整的无人直升机模型;
2)给定一个稳定的飞行状态,通过FlightLab进行模型的线性化和配平计算;
3)通过FlightLab计算,分别得到0m/s、3m/s、9m/s、15 m/s、20 m/s、25m/s、30 m/s、35 m/s、40 m/s、45 m/s等稳定飞行状态下的A、B矩阵。
4 仿真过程及结果
基于线性化直升机模型的直升机仿真过程如下:
1)启动各个传感器、舵机、多功能板仿真程序;
2)启动线性化直升机模型仿真程序:
3)启动飞行控制软件程序;
4)通过测控软件,发送飞行控制指令,开始飞行仿真;
5)通过测控软件,显示、记录仿真过程参数;
6)对飞行仿真结果进行参数分析。
以航线飞行仿真为例,其仿真结果如图5~7所示。
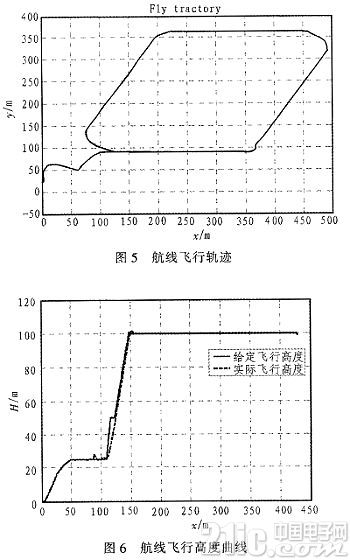
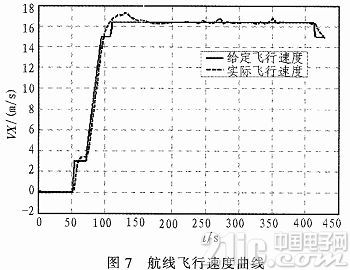
由仿真曲线可知,航线飞行高度100 m,高度控制精度能达到飞行高度的3%,飞行速度16 m/s,速度稳态控制精度能达到±1 m/s。
5 结论
该仿真系统的建立为无人直升机设计和控制策略的研究提供了试验平台,且方便携带和实际使用操作。实践表明,这套仿真系统可以非常有效地验证飞行控制系统的控制逻辑,直观地验证飞行控制系统控制效果的优劣,为飞控系统的优化设计和系统的性能评估等提供数据支持,具备了较好的工程应用价值。
无人直升机 线性化模型 数学模型 仿真系统 半物理仿真 相关文章:
- 控制系统的数学模型(03-17)
- 基于PCI总线的数字图像处理仿真系统设计方案(01-21)
- CRH5动车组转向架仿真系统设计与实现(08-30)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)