一种基于线性化直升机数学模型的仿真系统
摘要:为了配合飞行控制系统的设计和开发,本文设计了一种基于线性化直升机数学模型的半物理仿真系统。重点讲述了仿真系统的系统结构以及各个组成部分的功能,描述了线性化直升机仿真模型的基本原理和实现过程,并以航线飞行为例给出了仿真过程和仿真结果。实际使用表明,本系统具有结构简单、仿真准确、可靠性高的特点,达到了设计要求。
关键词:无人直升机;线性化模型;数学模型;仿真系统;半物理仿真
飞行控制系统决定了无人直升机的飞行性能,随着无人直升机性能的不断提高及功能的日益增加,飞行控制系统越来越复杂。某型半物理仿真系统是为配合飞行控制系统设计而开发的,主要为直升机飞行动力学模型的验证与评估、飞行控制软件的设计与验证等提供强有力的技术支撑平台。这对于提升飞行控制系统设计的效率、减少设计差错、缩短设计周期及降低设计成本具有重要意义。
1 仿真系统功能
某型半物理仿真系统的主要功能包括:
1)模拟无人直升机从起飞到降落整个飞行过程的全状态,进行全包线仿真;
2)评估验证直升机飞行动力学模型的准确性;
3)模拟无人直升机各个传感系统的报文和动态特性;
4)可接入飞行控制计算机实物、舵机系统和地面站实物(除去电台部分),进行半物理仿真实验。
2 仿真系统结构
根据无人直升机仿真模型获取方式不同,某型半物理仿真系统如图1、图2所示,形成了两种半物理仿真系统结构。
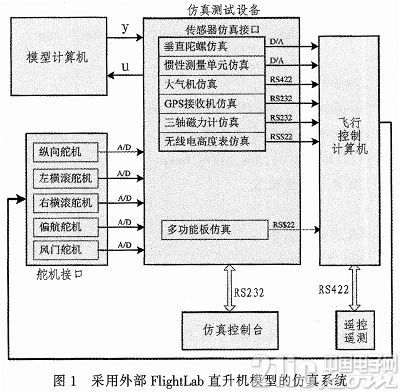
2.1 采用外部模型机的FlightLab直升机模型
如图1所示,该仿真系统由仿真测试设备、模型计算机、舵回路和飞控计算机等组成。其中,与仿真测试设备相配合的还有仿真控制台,与飞控计算机相配合的还有地面站测控软件。
1)仿真测试设备:运行仿真软件,其中主要包括传感器信息模拟软件、舵机信息模拟软件、多功能板信息模拟软件。各个模拟软件之间采用共享内存的方式进行信息交互。主要功能包括:①舵控指令接收解算并转换成4个操纵量作为模型输入信息;②直升机模型接收操纵指令,解算得到飞行状态信息作为传感器输入数据信息;③模拟传感系统的报文和动态特性;④和飞控计算机之间进行网络通信;⑤和模型机之间进行网络通信。
2)模型计算机:运行无人直升机FlightLab仿真模型;接收控制输入,并解算得到无人直升机实时状态数据。
3)舵回路:舵机可接实物舵机,也可直接通过仿真测试设备中的舵机信息模拟软件进行模拟。
4)飞控计算机:运行飞行控制软件,接收传感器状态信息以及遥控信息,根据无人直升机当前的飞行状态以及操纵指令解算得到舵机控制指令。
5)仿真控制台:运行仿真界面程序,可接受用户界面输入信息,主要实现模型状态量的曲线显示功能,以及各种传感器故障类型仿真、模型运行与重载控制等功能。
6)地面测控计算机:运行地面测控软件,用于对飞行控制计算机发送遥控指令,控制无人直升机的飞行模态,并接收飞行控制计算机的下行数据,显示、记录无人直升机飞行过程和任务设备运行状态。
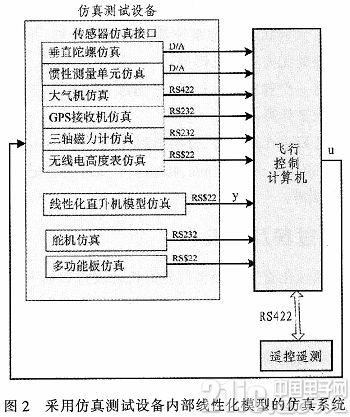
2.2 采用仿真测试设备内部的线性化模型
如图2所示,该仿真系统由仿真测试设备、飞控计算机和地面站测控软件等组成。其中,仿真测试设备中除了运行传感器信息模拟软件、舵机信息模拟软件、多功能板信息模拟软件,还将运行线性化直升机数学模型模拟软件。相比于2.1节所述的半物理仿真系统,该系统平台搭建简单且携带方便。但是,受到线性化直升机数学模型的精度限制,该系统仅适用于对仿真精度不高的情况。
3 线性化直升机模型
当进行飞控软件逻辑仿真或者其他对模型精度要求不高的仿真时,常采用仿真机内部的直升机线性模型。其主要优势在于便于快速搭建仿真平台,易于携带(不需要再携带模型机),特别是大大方便在外场调试过程中的仿真工作。
线性化直升机模型主要实现以下功能:接收飞控计算机解算出的控制输入数据;实时运行仿真模型;最后将模型解算得到直升机的相关状态数据反馈给飞控计算机。线性化直升机模型仿真模块的输入输出关系如图3所示。
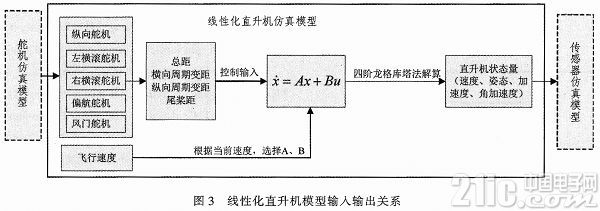
被控对象数学模型建立于机体坐标系,如图4所示。
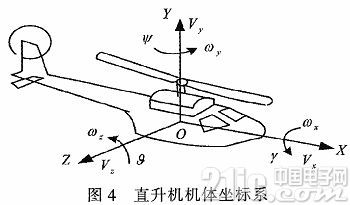
采用状态空间表达式形式描述,给定被控对象的数学模型为:

其中,状态x=[Vx Vy Vz ωx ωy ωz γ ψ θ]T,分别表示直升机纵向速度、垂向速度、横向速度、滚转角速度、偏航角速度、俯仰角速度、滚转角、偏航角和俯仰角;控制输入u=[φ7A1 B1 φT]T,分别表示旋翼总距、横向周期变距、纵向周期变距和尾桨总距。
状态矩阵A和控制矩阵B通过FlightLah计算得到,且随着无人直升机飞行状态的不同而改变。具体计算过程如下:
1)在FlightLab开发环境下,分别对主旋翼
无人直升机 线性化模型 数学模型 仿真系统 半物理仿真 相关文章:
- 控制系统的数学模型(03-17)
- 基于PCI总线的数字图像处理仿真系统设计方案(01-21)
- CRH5动车组转向架仿真系统设计与实现(08-30)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)