基于闭环模糊控制的步进系统仿真研究
则直接转化为控制策略,高效率地做出正确的处理和判断。因此,对于步进电机驱动控制系统,模糊控制是一种非常合适的选择。
2.3.1 模糊控制单元结构
深海采矿测控实验系统中的步进驱动控制系统速度控制单元结构框图如下所示:
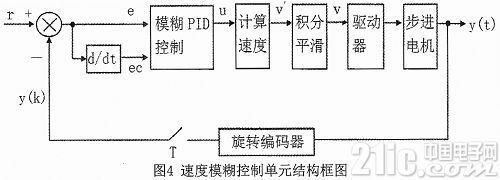
模糊控制系统选用二维控制器,输入为速度偏差e和偏差变化率△e。PID控制的初始值采用Ziegler-Nichols方法确定。模糊控制单元的输入是预定的目标速度r,旋转编码器测得的步进电机实际转速作为反馈输入,然后计算转速偏差e和偏差变化率ec,经过量化和模糊化后作为模糊控制器的输入信号,利用模糊规则判决后输出模糊控制量,模糊控制量再经过解模糊后输出步进电机转速的精确增量,与上一个控制周期的转速相加后输出。
模糊控制器采用两输入单输出结构,两路输出控制采用相同的控制规则表和参数。经过模糊算法后,实际输出速度为v’(k)=v’(k-1)+u(k)。为了有效防止步进电机因为控制量的突变而失步,系统输出v’需要积分平滑才得到速度v。
2.3.2 模糊控制规则的选择
步进电机的模糊控制系统有三个模糊变量:偏差e、偏差变化率ec和输出u。一般而言,控制语言的变化值越多,描述就越精确,控制精度也越高,控制效果越好,但过细的划分将会使控制规则复杂,计算量增加,实现难度加大。在模糊控制器中, 、
、 和U的模糊子集取相同的语言值,即{NB,NM,NS,ZO,PS,PM,PB},对应的论域[-3,-2,-1, O, 1, 2, 3]。
和U的模糊子集取相同的语言值,即{NB,NM,NS,ZO,PS,PM,PB},对应的论域[-3,-2,-1, O, 1, 2, 3]。
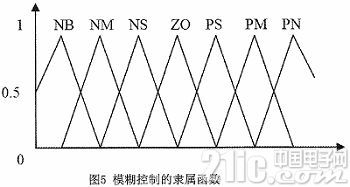
在模糊控制器中,隶属函数用于将实际的输入量转变为模糊量。形状越陡的隶属函数其分辨率越高,控制灵敏度也越高。而形状越缓的隶属函数其控制特性越平稳,系统稳定性越好。在实际系统中,速度的反馈量都会含有噪音。因此,隶属函数的选择还应考虑反馈量噪音的问题。三角形函数形状比较简单又易于计算,而且同其它复杂的隶属函数得出的结果相差很小,具有很好的性能。在本模糊控制器中,、和U的隶属函数均选用三角形函数,如图5所示。
为了使模糊控制器得到较好的控制效果,当速度的偏差较大时,模糊规则应使控制器的输出尽可能减小偏差;当速度的偏差较小时,模糊规则尽可能维持系统的稳定性,尽量避免超调。
常用的解模糊方法有最大隶属度法、中位数法和加权平均法等等。使用中位数法的模糊控制器类似于多值继电器,使用加权平均法的模糊控制器类似于PI控制器。这两种方法都优于最大隶属度法。图6为三种模糊推理和解模糊方法得到的控制结果示意图。
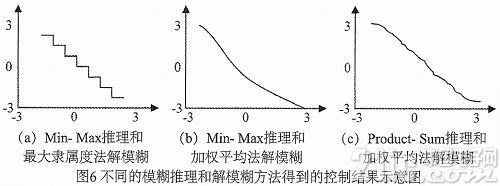
从上图可以看出,图(a)的最大隶属度法具有多值继电器的特性,不利于系统稳定;图(b)和图(c)比较接近。模糊推理方法对模糊控制器性能的影响比解模糊方法小。本模糊控制器采用Min-Max推理和加权平均法解模糊。
2.3.3 仿真结果
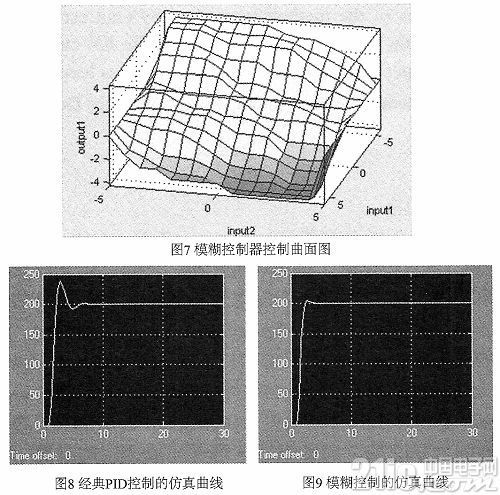
图7为模糊控制器的控制效果曲面图。图8和图9为给定速度200转/分,稳态误差选5%时,分别采用经典PID控制器和模糊PID控制器得到的速度仿真曲线。由图可知,模糊控制的上升时间略有增加,但超调量比经典PID控制小得多,稳定性更好,系统的总体性能大大提高。
3 结论
本文阐述了深海采矿测控实验系统的步进驱动系统模糊控制器的仿真分析研究过程,由对比仿真结果可知,采用模糊理论控制具有高度非线性特性的步进系统能比较有效地解决振荡和失步的问题。与经典PID控制器相比,模糊控制器大大提高了复杂系统的总体性能,具有良好的控制效果。模糊PID控制策略在步进驱动系统中具有很好的实用性。
- 基于模糊控制的光伏电池MPPT的设计(09-19)
- 基于MatIab的模糊PID控制系统设计及仿真(10-29)
- 单片机与模糊控制的温控仪设计与实现(03-22)
- 基于DSP的磁流变减振模糊控制系统设计(08-04)
- 电源完整性与地弹噪声的高速PCB仿真(05-23)
- 并联混合滤波器中连接电感的仿真研究(10-30)