基于DSP的磁流变减振模糊控制系统设计
前言
磁流变液是一种阻尼可控的智能材料,它由微米级的磁性颗粒与绝缘载液、稳定剂混合而成。在无磁场作用下其流变特性为牛顿流动,而在外加磁场的作用下, 磁流变液在毫秒级的时间内可以实现从液态到固态的可逆转换。当外加磁场撤去时,磁流变体又恢复到原来的液体状态,其响应时间仅为几毫秒,易于控制并且连续可控, 利用流变特性这一特性制作的磁流变减振器是一种典型的非线性系统,具有高度的非线性、时滞性和不确定性,非线性特性是其影响工作的重要因素。在磁流变减振控制系统中,采用传统的控制方法对磁流变阻尼器进行控制,控制效果有时难以满足要求,模糊控制不需要精确的数学建模,大量文献和工程应用表明,模糊控制具有很强的鲁棒性,能够较好的应用于磁流变减振控制系统。
本文设计一种基于DSP的磁流变减振模糊控制系统,以TMS320LF2407为控制系统核心,采用模糊控制策略,较好的实现了系统的减振控制,且系统结构简单、实现方便,适用性强。
1 系统设计方案
1.1 系统主控芯片TMS320LF2407
TMS320LF2407 芯片是美国德州仪器公司开发的 DSP 控制器 24x 系列的成员之一,是TMS320C2000 平台下的一种定点 DSP 芯片,具备以下特点:
(1)采用高性能静态 CMOS 技术,供电电压仅为 3.3V,功耗低;30MIPS的执行速度使得指令周期缩短到 33ns(30MHz),实时控制能力强。
(2)片内有高达32K的 FLASH 程序存储器,高达 1.5K 字的数据/程序 RAM,544 字双口RAM(DARAM)和 2K 字的单口 RAM。
(3)两个事件管理器模块 EVA 和 EVB,每个包括:两个 16 位通用定时器;8 个 16 位的脉宽调制(PWM)通道。10 位 A/D 转换器,最小转换时间为 500ns,可选择由EVA或EVB来触发的两个8 通道输入 A/D 转换器或一个 16 通道输入的 A/D 转换器。
(4)可扩展的外部存储器总共 192 字空间;64K 字程序存储器;64K 字 I/O 寻址空间。
(5)高达 40 个可单独编程或复用的通用输入/输出引脚(GPIO)。
(6)5 个外部中断,电源管理包括3 种低功耗模式,并且能独立将外设器件转入低功耗模式,16位串行外设接口模块。
利用芯片的片内外设及其优点,以此芯片作为系统控制器的核心。
1.2 模糊控制技术
模糊控制特别适用于存在参数时变、非线性、强耦合系统,这类系统的精确数学模型的建立困难很大,甚至于无法建模。模糊控制是通过模糊控制器来实现的,模糊控制器是对人脑所具有的模糊推理机能的模拟。它是应用模糊数学的知识,模拟人的思维方法,把人类自然语言描述的控制策略改造成模糊控制规则,依据规则确定控制量。模糊控制基于模糊控制规则、经推理后控制被控对象,鲁棒性强。模糊推理控制在智能结构振动控制中已有较多的应用。本文采用模糊推理策略,设计了相应的模糊控制器,实现控制电流的输出控制。模糊控制结构框图如图1所示:

2 硬件电路
本设计中,减振系统的垂直加速度和加速度变化率信号经输入电路处理后输入DSP控制器,然后通过控制算法得到输出量,最终控制器输出的是脉宽调制 (PWM)信号,经功率放大后,通过调节主回路的导通时间输出不同的电流,从而改变磁流变阻尼器的阻尼系数,实现控制作用。硬件电路主要包括信号输入电路、TMS320LF2407控制器和PWM驱动电路。
系统就构框图如图2:
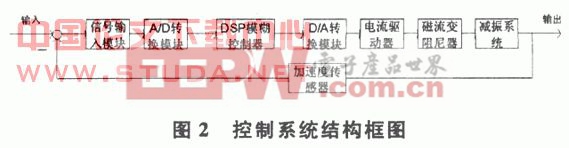
如图所示,控制系统硬件平台由加速度传感器、信号输入模块、A/D转换模块、DSP控制器、电流驱动器、磁流变阻尼器以及减振平台等部件组成。系统用加速度传感器采集减振平台垂直加速度,然后对采集的信息进行分析、处理,并向执行元件发出控制指令,最后产生动作。
在信号输入电路中,模数转换芯片根据系统采样率、ADC有效位数等要求,选用TI公司的16位标准同步串行接口(SPI)芯片ADS8320和 MAXIM公司的MAX125。ADS8320与DSP串口连接,连接信号线DCLOCK、数据传输信号Dout和使能信号CS,MAX125的数据线直接和DSP相连。采用查询模糊控制表实现模糊控制器的控制作用,通过事先的离线计算得到模糊控制器的查询表,然后将查询表存放到计算机中,在过程控制中,计算机直接根据采样参数e和de,由查询表行、列找到与之对应的同样以论域元素形式表现的模糊控制量变化u,再由反模糊化过程得到精确控制量,并以此控制输出电流的大小。
输出电路芯片采用DAC7625,用电流驱动器来转换出磁流变阻尼器所需要的电流信号。
先初始化比较单元,设置和载入比较控制寄存器、定时器。由EVB模块的定时器3的周期中断触发PWM中断,PWM中断子程序主要完成调整比较寄存器的值以输出不同占空比的PWM波形,然后开A/D中断。
- 基于模糊控制的光伏电池MPPT的设计(09-19)
- 基于MatIab的模糊PID控制系统设计及仿真(10-29)
- 基于闭环模糊控制的步进系统仿真研究(10-16)
- 单片机与模糊控制的温控仪设计与实现(03-22)
- 无线紧急呼救系统的设计(08-30)
- 基于JXTA的P2P远程学习系统的设计与实现(08-27)