基于闭环模糊控制的步进系统仿真研究
摘要:以中国大洋协会(COMRA)深海采矿测控实验系统中的步进驱动控制系统为例,采用优化的步进电机升降速曲线,建立了等效的仿真模型,重点进行了步进驱动控制系统模糊PID控制器的仿真研究。与经典PID控制器的对比结果表明,模糊PID控制器具有更高的精度和更强的适应性,非常适用于控制系统内部参数非线性且强耦合的场合。
关键词:模糊控制;仿真;步进电机;驱动控制
0 引言
步进电机能将输入的数字脉冲转换为角位移输出,易于用计算机进行控制。步进电机是伺服系统中应用最为广泛的执行元件。在自动控制、移动机器人等工程领域,有至少三分之二的伺服控制系统是步进驱动系统。然而,基于开环控制的步进驱动系统存在振荡和失步,在很多需要精确控制的工程领域会导致许多问题。因此,研究开发步进电机的高精度驱动控制系统具有重大的现实意义。对于步进电机这种内部参数非线性且强耦合的系统,普通PID控制的效果不够理想。而模糊控制本质上就是一种非线性控制,非常适合步进电机系统的控制驱动。
1 课题来源
多金属结核是一种蕴藏在6000米深海底的极赋经济价值的矿产资源。近十几年来,中国已投入大量人力物力对多金属结核采矿系统和开采技术进行了深入的研究。鉴于深海作业环境的特殊性和复杂性,深海多金属结核的开采面临着诸多困难和风险。因而,我国对多金属结核采矿系统进行了虚拟样机的建模和计算仿真。同时,必须采用实验手段验证建模仿真结果的合理性和正确性。研制深海采矿系统的测控实验系统正是为了这一目的而展开的。而测控系统中最重要的部分之一就是步进电机的驱动控制系统。高性能的控制策略能使实验系统具有高精度和更好的稳定性,它对于实验数据的正确性和准确性至关重要。
测控实验系统的结构框图如图1所示。

2 步进驱动系统的控制策略与仿真研究
2.1 步进电机升降速曲线选择
常见的升降速曲线主要有阶梯升降速、加速度恒定升降速和定常数递减升降速三种。阶梯升降速方法的缺点是步进电机在速度阶跃时容易失步。加速度恒定升降速方法未充分考虑步进电机输出力矩随速度变化的特性,在高速时也会失步。定常数递减的升降速方法的缺点是低频时升速太慢,高频时升速太快。以上三种升降速曲线都不够理想,因此应该在研究步进电机的运动特性的基础上设计其升降速运行曲线。
由步进电机动态特性可知其惯性扭矩为:

上式中:J系统总转动惯量;ω是电机角速度;β是机械阻尼和电磁阻尼系数;ε是角加速度;TL是摩擦阻力矩和负载力矩;Te是步进电机电磁转矩。
由式(1)可知,步进电机的转矩在驱动脉冲频率较低时比较大,随着频率的上升近似于线性下降。
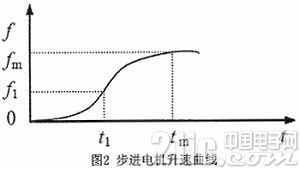
在升速阶段,为了提高系统的快速性,应使角加速度ε尽可能大。在保证步进电机不失步的前提下,转子角加速度ω正比于频率f对时间的微分。步进电机的升速曲线如图2所示。降速曲线为升速益线的对称曲线。这种升降速曲线能充分利用步进电机的有效转矩。快速响应性好,并且可以防止失步和过冲,容易在微处理器控制的驱动器上实现。
2.2 步进电机的数学模型
由两相混合式步进电机的电气与电磁回路结构,可得出其线性等值回路如图3。两相混合式步进电机的仿真模型可以归结为两相绕组回路的电压方程和转子的运动方程。转子的运动方程参见式(1),回路的电压方程如式(2)所示:
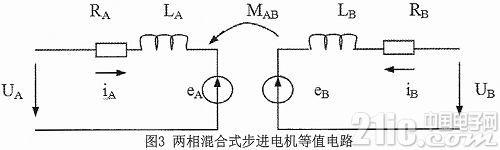
上式中,eA、eB为A、B绕组中的运动电势,UA、UB为端电压;RA、RB为A、B绕组的线圈电阻;iA、iA为绕组电流;LA、LA为绕组自感;MAB为绕组互感,一般来说,两相步进电机相间互感较小,可忽略不计。

根据式2和步进电机的动态特性,电机单相通电时,角位移的传递函数为:
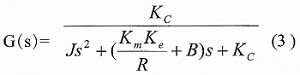
式中,KC、KE、Km分别为常数、电动势系数、转矩系数。
根据实验系统要求选定了步进电机型号,各个常数相应确定。本实验系统选用的是Kinco公司的2S86Q-85B8型步进电机,其参数为:保持扭矩 8.5N.m,转子惯量3.4Kg.cm2,额定电流6A/Phase,步进角1.8°。将各个参数代入式(3)得到对应的角位移传递函数。
2.3 步进驱动控制系统的模糊控制研究与仿真分析
在深海采矿测控实验系统中,步进电机通过传动机构驱动模拟集矿机等部件运动,如果步进电机超调或者旋转速度大幅度波动,势必影响力学实验数据的精确度和可靠性。由于步进电机具有内部各状态变量高度非线性并相互耦合的特性,难以用简单的数学模型来进行描述,如果采用经典的控制理论难以满足系统的控制要求。模糊控制则不依赖于控制对象具体的数学模型,而是通过利用模糊集合理论将专家知识或者熟练操作人员的经验形成语言规
- 基于模糊控制的光伏电池MPPT的设计(09-19)
- 基于MatIab的模糊PID控制系统设计及仿真(10-29)
- 单片机与模糊控制的温控仪设计与实现(03-22)
- 基于DSP的磁流变减振模糊控制系统设计(08-04)
- 电源完整性与地弹噪声的高速PCB仿真(05-23)
- 并联混合滤波器中连接电感的仿真研究(10-30)