基于MatIab的模糊PID控制系统设计及仿真
时间:10-29
来源:互联网
点击:
数变化后,模糊PID控制的控制效果最佳,其响应速度最快,超调量小,调节时间最短。
在实际工作环境中,锅炉液位控制系统不可避免地会受到各种扰动的影响。在仿真时间为55 s时,加入50阶跃响应扰动,系统响应曲线如图8所示。
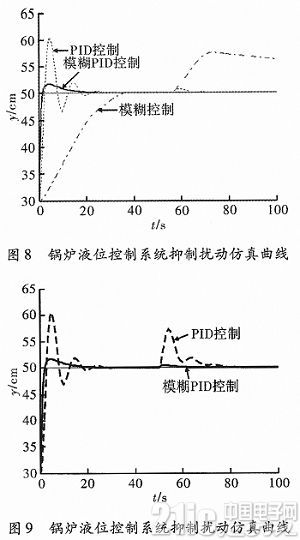
由图8可见,模糊PID控制的抑制扰动性能最理想,受到100%的阶跃扰动时基本无影响。在仿真时间为50 s时加入500阶跃扰动时,实验发现模糊控制的静差较大,已失去实际意义,传统PID控制和模糊PID控制的响应曲线如图9所示。
由图9可见,加入1 000%的阶跃扰动时,模糊PID控制系统不会受到过大影响,超调量为2%,不到20 s便可使系统输出值达到预期的理想值,鲁棒性好,而PID控制系统的超调量明显偏高,且调节时间偏长。一系列仿真实验验证了模糊PID控制的灵活性、适应性、鲁棒性等性能均较为理想。
4 结束语
模糊PID控制是在常规PID算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊推理系统,查询模糊矩阵表进行参数调整,该方法实现简单、方便易用,对实际控制有重要指导意义。用模糊推理的方法在动态过程中改变PID的参数,能够发挥两种控制方式的优点,克服两者的缺点,提高控制质量。仿真结果表明,应用模糊PID控制方式对锅炉液位进行控制,适应力强,鲁棒性好,取得了令人满意的控制效果。
模糊控制 PID控制 Matlab仿真 锅炉液位 相关文章:
- 基于模糊控制的光伏电池MPPT的设计(09-19)
- 基于闭环模糊控制的步进系统仿真研究(10-16)
- 单片机与模糊控制的温控仪设计与实现(03-22)
- 基于DSP的磁流变减振模糊控制系统设计(08-04)
- 基于高性能AD变换器和DSP的电源设计(10-22)
- 基于积分分离PID控制的交流伺服系统(01-31)