如何提升机器人伺服电机的响应性能
时间:08-10
来源:互联网
点击:
当前国内机器人发展迅猛,尤其是工业机器人领域。但在机器人的反应速度、精度上,国内外产品还是存在一定差距的,那么关键点是在哪呢?
关键在于机器人的核心零部件——伺服电机。机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度要求高的话,实际就是要求伺服电机的响应速度、控制精度要足够高。

而在机器人实际运行时,往往伺服电机是处于各种加减速、正反转状态,那就对伺服电机的短时过载能力、惯量适应范围、频率响应带宽、转速/扭矩响应时间提出了很高的要求。
其中一个非常重要的指标就是频率响应带宽,它决定了该伺服系统对指令的响应速度快慢,是机器人设计者的重要关注指标。

伺服电机频率响应带宽的定义:伺服系统能响应的最大正弦波频率就是该伺服系统的频率响应带宽。用专业一些的语言描述,就是幅频响应衰减到-3dB时的频率(-3dB带宽),或者相频响应滞后90度时的频率。
更具体一点,像机械部标准《交流伺服驱动器通用技术条件》(JB T 10184-2000)中规定了伺服驱动器带宽的测试方法:驱动器输入正弦波转速指令,其幅值为额定转速指令值的0.01倍,频率由1Hz逐渐升高,记录电动机对应的转速曲线,随着指令正弦频率的提高,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐渐增大,而幅值逐渐减小。相位滞后增大至90度时的频率作为伺服系统90度相移的频带宽度;幅值减小至低频时0.707倍的频率作为伺服系统-3dB频带宽度。
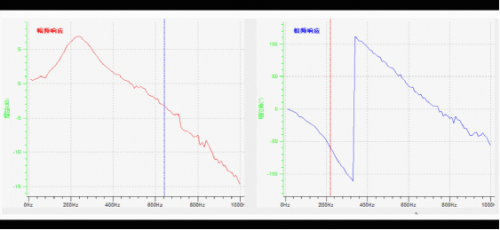
频率响应带宽国标测试结果
可以说,频率响应带宽越快,伺服系统就可以对变化更快的指令实现及时响应,即使工业机器人的动作再复杂,也能及时响应,驱动机器人的每一个关节位置控制到位。
而影响频率响应带宽的因素有很多,像伺服驱动器或者控制系统参数、传动链的刚度或精度、传动间隙、负载惯量等都会对伺服系统的响应带宽产生影响。过去业内很多研究者由于缺乏测试装备,故只能通过加实际负载的测试来判断伺服系统及机器人的响应性能,属于定性分析,无法定量分析。因此国内的伺服系统目前在响应速度一块仍需加强,像一般的伺服电机,响应带宽最高只能做到几百Hz左右,比较优质的能做到1kHz;而国外的产品,如日系的安川、三菱、松下等,却在多年以前已突破2kHz的关卡。

针对机器人及伺服电机行业的用户需求,致远电子推出MPT混合型电机测试系统,面向伺服电机行业应用,可独家提供频率响应带宽、转速/扭矩控制响应等伺服电机前沿测试功能,满足国内外用户对于伺服电机产品的功能研究和产品研发需要,为中国的“智能制造”目标提供枪炮弹药。
关键在于机器人的核心零部件——伺服电机。机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度要求高的话,实际就是要求伺服电机的响应速度、控制精度要足够高。
而在机器人实际运行时,往往伺服电机是处于各种加减速、正反转状态,那就对伺服电机的短时过载能力、惯量适应范围、频率响应带宽、转速/扭矩响应时间提出了很高的要求。
其中一个非常重要的指标就是频率响应带宽,它决定了该伺服系统对指令的响应速度快慢,是机器人设计者的重要关注指标。
伺服电机频率响应带宽的定义:伺服系统能响应的最大正弦波频率就是该伺服系统的频率响应带宽。用专业一些的语言描述,就是幅频响应衰减到-3dB时的频率(-3dB带宽),或者相频响应滞后90度时的频率。
更具体一点,像机械部标准《交流伺服驱动器通用技术条件》(JB T 10184-2000)中规定了伺服驱动器带宽的测试方法:驱动器输入正弦波转速指令,其幅值为额定转速指令值的0.01倍,频率由1Hz逐渐升高,记录电动机对应的转速曲线,随着指令正弦频率的提高,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐渐增大,而幅值逐渐减小。相位滞后增大至90度时的频率作为伺服系统90度相移的频带宽度;幅值减小至低频时0.707倍的频率作为伺服系统-3dB频带宽度。
频率响应带宽国标测试结果
可以说,频率响应带宽越快,伺服系统就可以对变化更快的指令实现及时响应,即使工业机器人的动作再复杂,也能及时响应,驱动机器人的每一个关节位置控制到位。
而影响频率响应带宽的因素有很多,像伺服驱动器或者控制系统参数、传动链的刚度或精度、传动间隙、负载惯量等都会对伺服系统的响应带宽产生影响。过去业内很多研究者由于缺乏测试装备,故只能通过加实际负载的测试来判断伺服系统及机器人的响应性能,属于定性分析,无法定量分析。因此国内的伺服系统目前在响应速度一块仍需加强,像一般的伺服电机,响应带宽最高只能做到几百Hz左右,比较优质的能做到1kHz;而国外的产品,如日系的安川、三菱、松下等,却在多年以前已突破2kHz的关卡。
针对机器人及伺服电机行业的用户需求,致远电子推出MPT混合型电机测试系统,面向伺服电机行业应用,可独家提供频率响应带宽、转速/扭矩控制响应等伺服电机前沿测试功能,满足国内外用户对于伺服电机产品的功能研究和产品研发需要,为中国的“智能制造”目标提供枪炮弹药。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)