Xilinx FPGA入门连载36:倒车雷达实例之设计说明
时间:12-14
来源:互联网
点击:
Xilinx FPGA入门连载36:倒车雷达实例之设计说明
特权同学,版权所有
配套例程和更多资料下载链接:
http://pan.baidu.com/s/1jGjAhEm

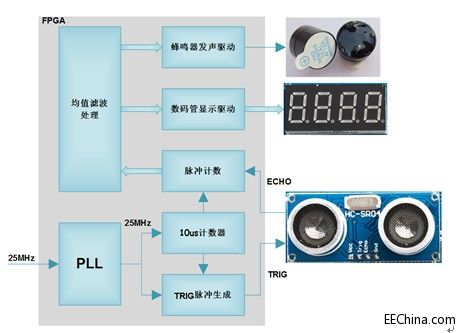
本实例的系统功能框图如图所示。在上一个实例的基础上,我们增加了蜂鸣器发声驱动控制驱动模块,该模块根据障碍物和超声波测距模块之间的实测距离,相应的驱动蜂鸣器发出不同频率的响声。
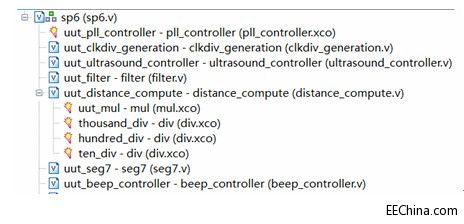
FPGA工程模块的层次划分如图所示。
连接好下载线,给SP6开发板供电。
打开ISE,进入iMPACT下载界面,将本实例工程下的sp6.bit文件烧录到FPGA中在线运行。
此时我们在超声波测距模块前面摆放平整的障碍物,可以看到数码管上的数据会发生变化。这里显示的数据,是以mm为单位,实际换算好的距离信息。大家可以很直观的获得当前障碍物和超声波测距模块之间的距离。此外,在超声波测距模块和障碍物距离不同的情况下,蜂鸣器会发出不同声调的声音,从我们设计角度看,应该是符合如下的规律。
| 距离 | 蜂鸣器发声 |
s ≤ 40cm | 频率0.5Hz,占空比100% |
40cm < s ≤ 75cm | 频率0.5Hz,占空比80% |
75cm < s ≤ 125cm | 频率1Hz,占空比40% |
125cm < s ≤ 200cm | 频率2Hz,占空比20% |
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 基于PLB总线的H.264整数变换量化软核的设计(03-20)
- 迄今为止最牛的ASIC验证平台(05-22)
- 验证FPGA设计:模拟,仿真,还是碰运气?(08-04)