一种节能型可升级异步FIFO的FPGA实现
时间:11-11
来源:互联网
点击:
2.2 读控制模块
读数据控制模块主要功能是:根据数据的输出及读请求信号产生用于读数据的控制信号、读地址指针、FIFO空(empty)信号以及用于控制写时钟Wr_full信号(其具体功用在2.3中介绍)。当外部有数据读出请求(Rd_req有效)且FIFO不为空时,使能FIFO的读有效,FIFO输出数据,输出数据完成后读地址指针加1。其中空信号的产生采用2.1中的方法,其内部实现的具体框图如图4所示。
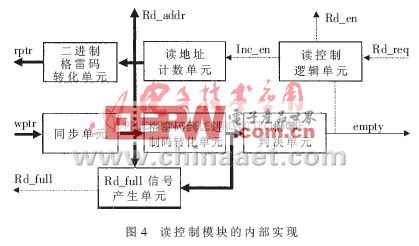
在图4中,读控制逻辑单元主要用于产生读使能信号,依据读请求信号和FIFO的空(empty)信号产生读使能。当有读请求并且FIFO不为空时,读使能有效,同时使地址指针加1。读地址计数器即是一个二进制的计数器,产生输入双口RAM的读地址指针。由于读地址指针要传输到写控制模块,而两模块处于不同的时钟域,为了使数据有效传输到写时钟域,采用先将读地址指针表示的二进制数转化为格雷码(具体实现参见文献[2])后再传输。
2.2.1 同步模块的实现
由于实际应用于系统中时钟频率较高,为了达到稳定,选择了流水线的同步器单元。在图2的基础上增加寄存器的位宽。为了使系统的稳定性增强,采用三级流水线的结构,当然,也可以根据自己实际的需要而增减流水线级数。
2.2.2 格雷码二进制码转化
为了应用环型指针区别FIFO的空/满信号,需要将传输过来用格雷码表示的写地址指针转化为二进制码,格雷码到二进制码转化的公式如式(1)。设格雷码表示的数据与二进制码有n位,格雷码表示为:gn-1gn-2…g0,相应二进制码表示为:bn-1bn-2…b0。转化公式为:

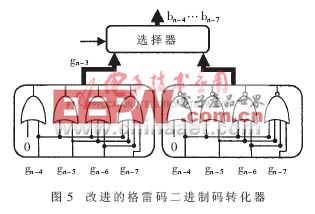
式(1)中所示的加代表无进位的加法,实现中使用“异或门”即可。但是,完全按照式(1)来实现存在缺点,从式(1)中可以看出,其为一个递推式,最先计算出最高有效位bn-1,最后计算出b0,一次转化完成需要经过n-1个“异或门”的延时,当位数据位增加时,这将成为系统的运行瓶颈。在高速系统中表现的特别突出。提出一种改进的转化单元。将式(1)转化为式(2),如下所示:

可以看出,一次转化只需要一个“异或门”的延时即可完成,但这种结构不适合FPGA中实现。在基本的门电路中,当门电路的扇入数据达到或者超过5时,延时将变得很大,而且大的扇入门电路的实现变得不现实且相当耗资源。将“异或门”的扇入数据限制在4以内(包括4个)。从“异或门”的规律中可以得出,任何变量与逻辑“0”异或,是其本身,而与“1”异或,是其相反变量。将待转化的数据分为四位一组,第一组为(b3…b0),较高的位(如b7…b4)依此细分下去……最高的4位采用如式(2)中进行转化,较低的4位如(bn-4…bn-7)采用如图5的方式转化……这种方式的转化器相对于式(1)实现来说,在不增加门电路资源消耗的基础上,能明显提高转化速度。|
2.2.3 相等判决单元
相等判决单元是一个二进制数比较器,当且仅当读/写地址指针完全相等时,给出空信号有效,否则空信号无效。
2.2.4 Rd_full信号产生单元
Rd_full信号产生单元的结构与FIFO满(full)产生单元的结构相同,Rd_full信号是full信号在读时钟域中的一个复制信号,用于写时钟控制。在时钟控制单元将详细介绍其功能。
2.3 写控制模块
写控制模块的实现与读模块相似,由与读模块相应的单元组成。只是FIFO满(full)时的产生逻辑为当读地址指针与写地址指针最高有效位不同,而其他位均完全相同时,满信号有效。另一不同点体现在Wr_empty信号的产生上,Wr_empty只是FIFO为空(empty)信号时在写时钟域中的一个复制信号,用于读时钟的控制。
2.4 读时钟控制模块
从以上的介绍中可以看出,各个模块的工作统一由时钟来管理,在高速的数字系统中,高速也将带来高的能耗。笔者从实际工作中观察发现,FIFO的工作是需要调配的,只有在DSP需要数据时,才需要FIFO处于工作状态,而在DSP两次需求之间,大量的时间中FIFO是处于空闲状态(这样的情形也符合大多数的实际应用)。可以充分利用这段空闲,让FIFO既能在正常工作时高速而稳定地工作,同时在空闲时能尽可能降低能耗。时钟控制模块即能达到此目的。在空闲时,将FIFO的读/写时钟停止,使空闲的模块处于“休眠”状态。但在正常工作时,时钟能照常管理各个模块。采用Virtex-4芯片内部自带的时钟管理模块(Digital Clock Manager-DCM)[4]来实现。Virtex-4芯片中的DCM提供强大的时钟管理功能,包括:时钟去抖动、频率合成、移相及动态时钟配置。
应用中,主要利用其时钟去抖动和动态时钟配置两项功能。在读时钟控制模块中,当检测到FIFO为空且Wr_empty同时有效时(如同时为高电平),通过DCM即可暂停读时钟。此时FIFO模块中的所有读组件将会停止运行。此时若写入数据,由于Wr_empty处在写时钟域中,写时钟的控制下,Wr_empty将不会有效(变为低电平),此时通过DCM唤醒读时钟,可以正常读出数据,同理可以控制写时钟的暂停与恢复。按照以上的原理设计,用Xilinx ISE 10.1仿真后,得到的仿真波形如图6。clk_in为输入时钟,clk_out为经过控制的时钟,而clk0_out是不经过控制的输出时钟。从图中可以看出,当使能信号为有效(低电平)时,clk_out没有时钟输出,而当使能信号无效时,clk_out时钟正常恢复。可以通过将Wr_empty与empty经过“与非”后接到读时钟clk_en端即可。

读数据控制模块主要功能是:根据数据的输出及读请求信号产生用于读数据的控制信号、读地址指针、FIFO空(empty)信号以及用于控制写时钟Wr_full信号(其具体功用在2.3中介绍)。当外部有数据读出请求(Rd_req有效)且FIFO不为空时,使能FIFO的读有效,FIFO输出数据,输出数据完成后读地址指针加1。其中空信号的产生采用2.1中的方法,其内部实现的具体框图如图4所示。
在图4中,读控制逻辑单元主要用于产生读使能信号,依据读请求信号和FIFO的空(empty)信号产生读使能。当有读请求并且FIFO不为空时,读使能有效,同时使地址指针加1。读地址计数器即是一个二进制的计数器,产生输入双口RAM的读地址指针。由于读地址指针要传输到写控制模块,而两模块处于不同的时钟域,为了使数据有效传输到写时钟域,采用先将读地址指针表示的二进制数转化为格雷码(具体实现参见文献[2])后再传输。
2.2.1 同步模块的实现
由于实际应用于系统中时钟频率较高,为了达到稳定,选择了流水线的同步器单元。在图2的基础上增加寄存器的位宽。为了使系统的稳定性增强,采用三级流水线的结构,当然,也可以根据自己实际的需要而增减流水线级数。
2.2.2 格雷码二进制码转化
为了应用环型指针区别FIFO的空/满信号,需要将传输过来用格雷码表示的写地址指针转化为二进制码,格雷码到二进制码转化的公式如式(1)。设格雷码表示的数据与二进制码有n位,格雷码表示为:gn-1gn-2…g0,相应二进制码表示为:bn-1bn-2…b0。转化公式为:
式(1)中所示的加代表无进位的加法,实现中使用“异或门”即可。但是,完全按照式(1)来实现存在缺点,从式(1)中可以看出,其为一个递推式,最先计算出最高有效位bn-1,最后计算出b0,一次转化完成需要经过n-1个“异或门”的延时,当位数据位增加时,这将成为系统的运行瓶颈。在高速系统中表现的特别突出。提出一种改进的转化单元。将式(1)转化为式(2),如下所示:
可以看出,一次转化只需要一个“异或门”的延时即可完成,但这种结构不适合FPGA中实现。在基本的门电路中,当门电路的扇入数据达到或者超过5时,延时将变得很大,而且大的扇入门电路的实现变得不现实且相当耗资源。将“异或门”的扇入数据限制在4以内(包括4个)。从“异或门”的规律中可以得出,任何变量与逻辑“0”异或,是其本身,而与“1”异或,是其相反变量。将待转化的数据分为四位一组,第一组为(b3…b0),较高的位(如b7…b4)依此细分下去……最高的4位采用如式(2)中进行转化,较低的4位如(bn-4…bn-7)采用如图5的方式转化……这种方式的转化器相对于式(1)实现来说,在不增加门电路资源消耗的基础上,能明显提高转化速度。|
2.2.3 相等判决单元
相等判决单元是一个二进制数比较器,当且仅当读/写地址指针完全相等时,给出空信号有效,否则空信号无效。
2.2.4 Rd_full信号产生单元
Rd_full信号产生单元的结构与FIFO满(full)产生单元的结构相同,Rd_full信号是full信号在读时钟域中的一个复制信号,用于写时钟控制。在时钟控制单元将详细介绍其功能。
2.3 写控制模块
写控制模块的实现与读模块相似,由与读模块相应的单元组成。只是FIFO满(full)时的产生逻辑为当读地址指针与写地址指针最高有效位不同,而其他位均完全相同时,满信号有效。另一不同点体现在Wr_empty信号的产生上,Wr_empty只是FIFO为空(empty)信号时在写时钟域中的一个复制信号,用于读时钟的控制。
2.4 读时钟控制模块
从以上的介绍中可以看出,各个模块的工作统一由时钟来管理,在高速的数字系统中,高速也将带来高的能耗。笔者从实际工作中观察发现,FIFO的工作是需要调配的,只有在DSP需要数据时,才需要FIFO处于工作状态,而在DSP两次需求之间,大量的时间中FIFO是处于空闲状态(这样的情形也符合大多数的实际应用)。可以充分利用这段空闲,让FIFO既能在正常工作时高速而稳定地工作,同时在空闲时能尽可能降低能耗。时钟控制模块即能达到此目的。在空闲时,将FIFO的读/写时钟停止,使空闲的模块处于“休眠”状态。但在正常工作时,时钟能照常管理各个模块。采用Virtex-4芯片内部自带的时钟管理模块(Digital Clock Manager-DCM)[4]来实现。Virtex-4芯片中的DCM提供强大的时钟管理功能,包括:时钟去抖动、频率合成、移相及动态时钟配置。
应用中,主要利用其时钟去抖动和动态时钟配置两项功能。在读时钟控制模块中,当检测到FIFO为空且Wr_empty同时有效时(如同时为高电平),通过DCM即可暂停读时钟。此时FIFO模块中的所有读组件将会停止运行。此时若写入数据,由于Wr_empty处在写时钟域中,写时钟的控制下,Wr_empty将不会有效(变为低电平),此时通过DCM唤醒读时钟,可以正常读出数据,同理可以控制写时钟的暂停与恢复。按照以上的原理设计,用Xilinx ISE 10.1仿真后,得到的仿真波形如图6。clk_in为输入时钟,clk_out为经过控制的时钟,而clk0_out是不经过控制的输出时钟。从图中可以看出,当使能信号为有效(低电平)时,clk_out没有时钟输出,而当使能信号无效时,clk_out时钟正常恢复。可以通过将Wr_empty与empty经过“与非”后接到读时钟clk_en端即可。
FPGA Xilinx DSP 总线 电路 比较器 仿真 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 采用EEPROM对大容量FPGA芯片数据实现串行加载(03-18)
- 赛灵思:可编程逻辑不仅已是大势所趋,而且势不可挡(07-24)