基于VHDL的多功能可变模计数器设计方案
时间:11-08
来源:互联网
点击:
随着电子技术、计算机技术和EDA技术的不断发展,利用FPGA/CPLD进行数字系统的开发已被广泛应用于通信、航天、医疗电子、工业控制等领域。与传统电路设计方法相比,FPGA/CPLD具有功能强大,开发周期短,投资少,便于追踪市场变化及时修改产品设计,以及开发工具智能化等特点。近年来,FPGA/CPLD发展迅速,随着集成电路制造工艺的不断进步,高性价比的FPGA/CPLD器件推陈出新,使FPGA/CPLD成为当今硬件设计的重要途径。在FPGA/CPLD的应用设计开发中,VHDL语言作为一种主流的硬件描述语言,具有很强的电路描述和建模能力,能从多个层次对数字系统进行建模和描述,从而大大简化了硬件设计任务,提高了设计效率和可靠性,并在语言易读性和层次化、结构化设计方面。表现出了强大的生命力和应用潜力。
QuartusⅡ是Altera公司在21世纪初推出的FPGA/CPLD集成开发环境,是Altera公司前一代FPGA/CPLD集成开发环境Max+PlusⅡ的更新换代产品,其界面友好,使用便捷,功能强大,为设计者提供了一种与结构无关的设计环境,使设计者能方便地进行设计输入、快速处理和器件编程。
计数器是数字系统中使用最多的时序电路之一,不仅能用于对时钟脉冲计数,还可以用于分频、定时、产生节拍脉冲和脉冲序列以及进行数字运算等。可变模计数器由于计数容量可以根据需要进行变化,为其广泛使用创造了便利。这里在QuartusⅡ开发环境下,用VHDL语言设计了一种具有清零、置数、使能控制、可逆计数和可变模功能的计数器。
1 基本可变模计数器设计
可变模计数器是指计数/模值可根据需要进行变化的计数器。电路符号图1所示,clk为时钟脉冲输入端,clr为清零端,m为模值输入端,q为计数输出端。
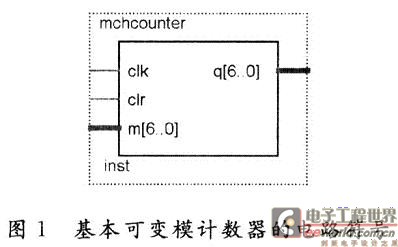
基本可变模计数器的VHDL代码如下所示:

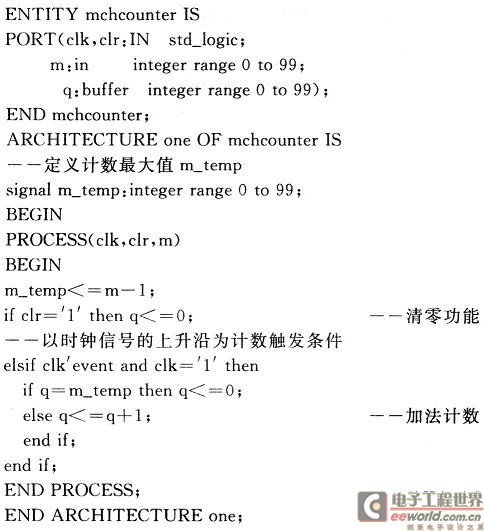
说明:上述代码设计采用了常用的if语句结构,即“if条件句then顺序语句elsif条件句then顺序语句else顺序语句end if”结构,实现模值小于99的可变模计数。
从上述的代码可以看出,基本的可变模计数器的功能单一。仿真验证则表明在进行模值变换时,基本的可变模计数器存在一些功能上的缺陷:计数器若是由较小的模值变化为较大的模值时,能正常的进行变模计数;但当其由较大的模值变化为较小的模值,则可能出现计数失控,如图2所示,图中显示了当模值由12变换为7时,即发生了计数失控。失控的原因是大于当模值由12变换为7时,计数输出为q为11,大于当前模值7的计数最大值6,由此产生了计数失控。

2 改进的多功能可变模计数器
为了克服上述基本可变模计数器的缺陷,并增加更多的控制功能,在此设计了一种改进的多功能可变模计数器,具有清零、置数、使能控制、可逆计数和可变模功能。其电路符号如图3所示,clk为时钟脉冲输入端,m为模值输入端,clr为清零控制端,s为置数控制端,d为置数输入端,en为使能控制端,updn为计数方向控制端,q为计数输出端,co为进位输出端。

这里所设计的多功能可变模计数器的VHDL代码如下所示:
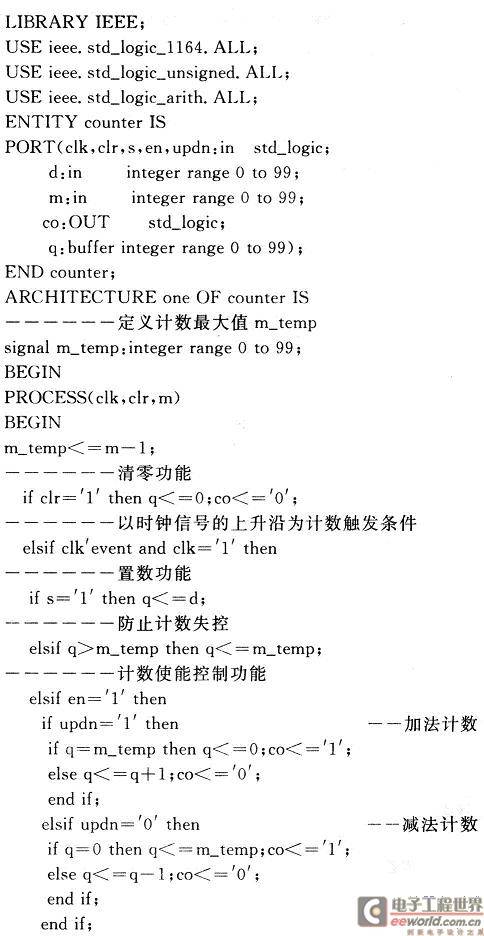
LIBRARY IEEE;
值得注意的是,这里所设计的多功能可变模计数器具有如下特点:
(1)该设计的多功能可变模计数器具有多个功能控制端。因此各个控制端的优先权顺序就成为设计的关键,经过理论分析和仿真调试,最终确认的优先权顺序为:clr(清零)→clk(时钟触发)→s(置数)→en(使能)→updn(计数方向)。这个优先权顺序可以有效地保证各个功能的完整实现,以及技术器的稳定运行。
(2)为了防止出现计数失控,大多数计数器采用给计数器增加一个复位控制端的办法,当发现计数输出q发生了计数失控时,通过复位控制端将计数器复位来排除计数失控。这种方法虽然有效,但是每次出现计数失控都要手动控制复位,给实际使用带来了不便。该设计的多功能可变模计数器中,将当前的计数输出q与当前的计数最大值m_temp进行比较,如果q比m_temp大,则强制将m_temp赋给q,这样就可以自动避免计数失控,不必再增加手动的复位控制端。
3 仿真结果分析
该多功能可变模计数器在QuartusⅡ开发环境下进行了仿真验证,功能仿真波形如图4所示,时序仿真波形如图5所示。

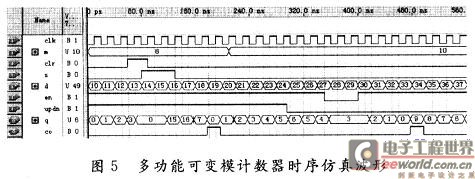
仿真结果分析如下:
(1)clk为时钟信号,由时钟信号的上升沿触发计数;
(2)m为模值输入端,当其变化时,计数容量相应发生变化;
(3)clr为清零控制端,当其为高电平时清零;
(4)s为置数控制端,当其为高电平时将置数输入端d的数据加载到输出端q;
(5)en为使能控制端,当其为高电平时正常计数,当其为低电平时暂停计数;
(6)updn为计数方向控制端,当其为高电平时计数器加法计数,当其为低电平时计数器减法计数。
QuartusⅡ是Altera公司在21世纪初推出的FPGA/CPLD集成开发环境,是Altera公司前一代FPGA/CPLD集成开发环境Max+PlusⅡ的更新换代产品,其界面友好,使用便捷,功能强大,为设计者提供了一种与结构无关的设计环境,使设计者能方便地进行设计输入、快速处理和器件编程。
计数器是数字系统中使用最多的时序电路之一,不仅能用于对时钟脉冲计数,还可以用于分频、定时、产生节拍脉冲和脉冲序列以及进行数字运算等。可变模计数器由于计数容量可以根据需要进行变化,为其广泛使用创造了便利。这里在QuartusⅡ开发环境下,用VHDL语言设计了一种具有清零、置数、使能控制、可逆计数和可变模功能的计数器。
1 基本可变模计数器设计
可变模计数器是指计数/模值可根据需要进行变化的计数器。电路符号图1所示,clk为时钟脉冲输入端,clr为清零端,m为模值输入端,q为计数输出端。
基本可变模计数器的VHDL代码如下所示:
说明:上述代码设计采用了常用的if语句结构,即“if条件句then顺序语句elsif条件句then顺序语句else顺序语句end if”结构,实现模值小于99的可变模计数。
从上述的代码可以看出,基本的可变模计数器的功能单一。仿真验证则表明在进行模值变换时,基本的可变模计数器存在一些功能上的缺陷:计数器若是由较小的模值变化为较大的模值时,能正常的进行变模计数;但当其由较大的模值变化为较小的模值,则可能出现计数失控,如图2所示,图中显示了当模值由12变换为7时,即发生了计数失控。失控的原因是大于当模值由12变换为7时,计数输出为q为11,大于当前模值7的计数最大值6,由此产生了计数失控。
2 改进的多功能可变模计数器
为了克服上述基本可变模计数器的缺陷,并增加更多的控制功能,在此设计了一种改进的多功能可变模计数器,具有清零、置数、使能控制、可逆计数和可变模功能。其电路符号如图3所示,clk为时钟脉冲输入端,m为模值输入端,clr为清零控制端,s为置数控制端,d为置数输入端,en为使能控制端,updn为计数方向控制端,q为计数输出端,co为进位输出端。
这里所设计的多功能可变模计数器的VHDL代码如下所示:
LIBRARY IEEE;
值得注意的是,这里所设计的多功能可变模计数器具有如下特点:
(1)该设计的多功能可变模计数器具有多个功能控制端。因此各个控制端的优先权顺序就成为设计的关键,经过理论分析和仿真调试,最终确认的优先权顺序为:clr(清零)→clk(时钟触发)→s(置数)→en(使能)→updn(计数方向)。这个优先权顺序可以有效地保证各个功能的完整实现,以及技术器的稳定运行。
(2)为了防止出现计数失控,大多数计数器采用给计数器增加一个复位控制端的办法,当发现计数输出q发生了计数失控时,通过复位控制端将计数器复位来排除计数失控。这种方法虽然有效,但是每次出现计数失控都要手动控制复位,给实际使用带来了不便。该设计的多功能可变模计数器中,将当前的计数输出q与当前的计数最大值m_temp进行比较,如果q比m_temp大,则强制将m_temp赋给q,这样就可以自动避免计数失控,不必再增加手动的复位控制端。
3 仿真结果分析
该多功能可变模计数器在QuartusⅡ开发环境下进行了仿真验证,功能仿真波形如图4所示,时序仿真波形如图5所示。
仿真结果分析如下:
(1)clk为时钟信号,由时钟信号的上升沿触发计数;
(2)m为模值输入端,当其变化时,计数容量相应发生变化;
(3)clr为清零控制端,当其为高电平时清零;
(4)s为置数控制端,当其为高电平时将置数输入端d的数据加载到输出端q;
(5)en为使能控制端,当其为高电平时正常计数,当其为低电平时暂停计数;
(6)updn为计数方向控制端,当其为高电平时计数器加法计数,当其为低电平时计数器减法计数。
电子 EDA FPGA CPLD 电路 集成电路 VHDL Quartus Altera 仿真 相关文章:
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 周立功:如何兼顾学习ARM与FPGA(05-23)
- 初学者如何学习FPGA(08-06)
- 为何、如何学习FPGA(05-23)
- 学习FPGA绝佳网站推荐!!!(05-23)
- 我的FPGA学习历程(05-23)