基于DSP和FPGA的嵌入式同步控制器实现
时间:10-11
来源:互联网
点击:
3 系统主要软件设计
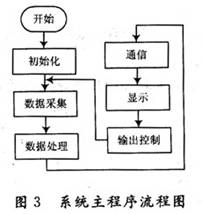
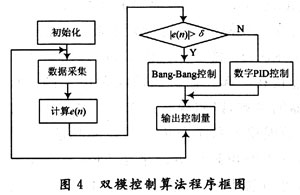
这里的程序采用模块化设计,软件主要包括主程序、数据采集程序、通信子程序、显示子程序、双模控制算法程序等。初始化程序主要完成各个寄存器的清零、定时器的初始化等。数据采集程序主要完成各电机转速的测量,显示子程序主要完成各输入量和各设定值的显示。双模控制程序主要用来提高系统的响应速度和稳定性能。主程序和双模控制程序如图3、图4所示。
4 试验验证
为了验证控制方案的可行性,在实验室以双单元异步电机(主动机、从动机)交流同步拖动系统为对象进行了模拟实际系统的实验。主电机型号Y90S-4;额定功率1.1 kW;额定电压380 V;额定电流2.8 A;额定转速1 400 rad/min;接法Y;频率50 Hz;从动机型号Y80-4;额定功率0.75 kW;额定电压380 V;额定电流7 A;额定转速1 450 rad/min;接法Y;频率50 Hz。选用直流发电机2台,分别由2台三相异步电动机拖动,加变阻箱后作为电动机的负载。两台变频器对两台三项异步电动机进行驱动。光电编码器将从动机的转速信号转换成脉冲信号,并送给控制器进行处理。
试验测得两电机的转速后绘制的曲线如图5~图8所示。
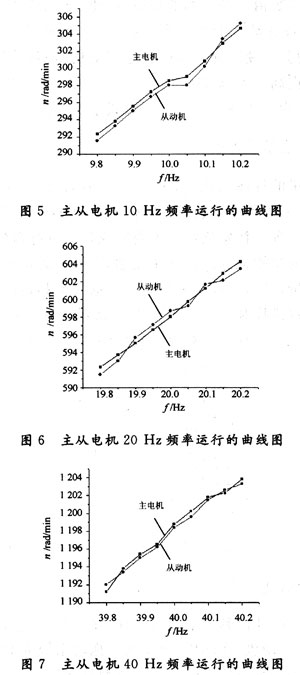
结果显示,系统进行过程中,主从电机低频段的跟随精度稍差,而高频段的跟随精度较高。主从电机在较宽的调速范围内都能达到很好的同步性能,动态过程的同步控制效果也较好,达到了预期的效果。
5 结语
研究表明,系统采用基于DSP和FPGA的嵌入式同步控制器后,对于多单元同步系统的动态同步性能有了明显的改造,运行稳定,无波动,达到了各分单元同步传动的控制要求,兼顾了系统响应的快速性和稳定性的要求,且控制精度高,具有很高的应用价值。
这里的程序采用模块化设计,软件主要包括主程序、数据采集程序、通信子程序、显示子程序、双模控制算法程序等。初始化程序主要完成各个寄存器的清零、定时器的初始化等。数据采集程序主要完成各电机转速的测量,显示子程序主要完成各输入量和各设定值的显示。双模控制程序主要用来提高系统的响应速度和稳定性能。主程序和双模控制程序如图3、图4所示。
4 试验验证
为了验证控制方案的可行性,在实验室以双单元异步电机(主动机、从动机)交流同步拖动系统为对象进行了模拟实际系统的实验。主电机型号Y90S-4;额定功率1.1 kW;额定电压380 V;额定电流2.8 A;额定转速1 400 rad/min;接法Y;频率50 Hz;从动机型号Y80-4;额定功率0.75 kW;额定电压380 V;额定电流7 A;额定转速1 450 rad/min;接法Y;频率50 Hz。选用直流发电机2台,分别由2台三相异步电动机拖动,加变阻箱后作为电动机的负载。两台变频器对两台三项异步电动机进行驱动。光电编码器将从动机的转速信号转换成脉冲信号,并送给控制器进行处理。
试验测得两电机的转速后绘制的曲线如图5~图8所示。
结果显示,系统进行过程中,主从电机低频段的跟随精度稍差,而高频段的跟随精度较高。主从电机在较宽的调速范围内都能达到很好的同步性能,动态过程的同步控制效果也较好,达到了预期的效果。
5 结语
研究表明,系统采用基于DSP和FPGA的嵌入式同步控制器后,对于多单元同步系统的动态同步性能有了明显的改造,运行稳定,无波动,达到了各分单元同步传动的控制要求,兼顾了系统响应的快速性和稳定性的要求,且控制精度高,具有很高的应用价值。
DSP FPGA 嵌入式 编码器 电路 CMOS 电压 MIPS Altera 总线 LCD 电流 电动机 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- FPGA作为协处理器在实时系统中的应用(04-08)
- 学习FPGA绝佳网站推荐!!!(05-23)
- 我的FPGA学习历程(05-23)
- 基于Spartan-3A DSP的安全视频分析(05-01)