一种基于FPGA 的新型误码测试仪的设计与实现
时间:07-25
来源:互联网
点击:
误码仪是评估信道性能的基本测量仪器。本文介绍的误码仪结合FPGA 的特点,采用全新的积分式鉴相结构,提出了一种新的误码测试方法,经多次测试验证,方案可行,设计的系统稳定。本文设计的误码仪由两部分组成:发信机和接收机。
1 发信机
发信机的主要功能是产生具有随机特性的伪随机m 序列,通过FPGA 由VHDL 编程实现。伪随机序列产生原理如下:

图1 伪随机序列产生原理图
其中,ak-i是各移位寄存器的状态,Ci对应各寄存器的反馈系数,为1表示参与反馈,为0不参与反馈。反馈函数为:

当级数n 和反馈系数一旦确定,则反馈移位寄存器的输出序列确定了,m序列的一个重要的性质是:任一m序列的循环移位仍是一个m序列,序列长度为m = 2n-1 。
2 接收机
接收机主要由时钟同步模块、状态同步模块组成,其功能框图如图2 所示。

图2 误码器接收机功能框图
2.1 时钟提取模块
本单元所采用的时钟提取方法是采用新的积分鉴相来实现的,通过在一个时钟周期内对码元进行积分,判断超前滞后,从而极大的降低了因干扰信号的出现导致误调的可能性。时钟提取的原理图如下:
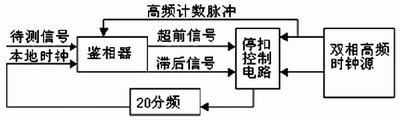
图3 时钟提取原理图
(1 )鉴相器
导前- 滞后型数字鉴相器的特点是,它输出一个表示本地估算信号超前或滞后于输入信号的量.如果本地估算信号超前于输入信号,则输出“超前脉冲”, 以便利用该“超前脉冲”控制本地估算信号的相位推后。反之,则输出“滞后脉冲”,并使本地估算信号的相位前移. 导前- 滞后型数字鉴相器可分为微分型和积分型两种.由于积分型导前- 滞后数字鉴相器,具有优良的抗干扰性能. 因此本设计采用了积分型导前-滞后型数字鉴相器.
积分型导前-滞后型数字鉴相器中,本地时钟的上升沿为同相积分的清洗时刻,上升沿到来时,在本地高频时钟下,同相计数器开始计数,当输入码元是“1”时,每来一高频脉冲计数器加1计数,当输入码元是“0”时,每来一高频脉冲计数器减1计数。当下一上升沿到来时,将计数值输出,并清零计数器,计数器在高频脉冲下重新开始计数.本地时钟的下降沿为中相积分的清洗时刻,在下降沿到来时,在上述同样的高频时钟下,中相积分计数器开始计数,当码元为“1”时,计数器加1,当码元为“0”时,计数器减1。当下一下降沿到来时,将计数值输出,同时对计数器清零,重新计数。在准确同步的情况下,同相积分的积分区间正好和接收的一个码元宽度相重合,同相积分计数器输出为± T(+T表示码元为1,-T 表示码元为0),而中相积分器的输出为0 或± T.在中相积分周期内若码元出现0→1或1→0变化,则中相积分器输出为0。在中相积分周期内,若码元没有翻转,码元始终为“1”,则中相积分计数器输出为T。若码元始终为“0”,则中相积分计数器输出为-T。若本地估算时钟超前于输入码元,当同相积分计数器的输出大于0,则随后的中相积分计数器的输出也大于0,当同相积分计数器的输出小于0时,则随后的中相积分计数器的输出也小于0。当同相积分计数器输出为+T或-T时,随后的中相积分计数器输出也为+T或-T 时,表明是处于连“1”或连“0”状态,则超前或滞后标志都为0。若本地估算时钟滞后于输入码元,当同相积分计数器的输出大于0,则随后的中相积分计数器的输出小于0,当同相积分计数器的输出小于0时,则随后的中相积分计数器的输出将大于0 。
当下降沿到来时,先检测同相计数器的输出,当为0时,如果中相计数器的输出为0,则表示还没开始检测,就没有超前滞后信息。如果中相计数器的输出不为0,则表示本地估算的时钟刚好与待检测的时钟正交,处于超前和滞后分界处,在这里对其做超前处理。如果同相计数器的输出不为0,此时如果中相计数器的输出为0,则表示刚好两时钟同步,故没有超前和滞后信息。如果中相计数器的输出为土20,即为整个码元的长度。则表示中相计数过程始终为“1”或“0”,出现连“1”或连“0”状态,为防止误操作,同样认为没有超前和滞后。如果此时中相计数器的输出不为0,也不为整个码元,则将同相计数器的输出和中相计数器的输出的符号位进行异或,即两者符号相同表示超前,符号不同表示滞后。
(2)双相高频时钟源与停扣控制电路
双相高频时钟源是形成两路窄脉冲信号,两个窄脉冲信号刚好相差180 度。停扣控制电路主要由添门和扣门组成,当来一个超前脉冲,加到扣门,扣除一个晶体脉冲,这样分频器的输出脉冲相位就滞后了1/20周期。当来一个滞后脉冲,加到添门,控制添门打开,加入一个晶体脉冲到或门。由于加到添门的晶振信号与加到扣门的晶振信号的相位相差180度,因此当从添门加入一个晶振脉冲到或门时,相当于在扣门输出的晶振信号中间插入一个窄脉冲,也就使分频器输入端添加了一个脉冲,这样分频器的输出相位就提前了1/20周期。从而实现位同步。
2.2 状态同步模块
状态同步模块主要包括逐位比较检测模块、误码统计与门限检测模块、并行输入与状态控制模块、状态并行比较模块、连“1”状态计数器模块。
(1)误码统计与门限检测模块:在时钟的节拍下,对误码脉冲计数,同时对时钟脉冲进行计数。若误码个数占时钟个数的30% 以上,则认为误码率很高,说明系统两序列的状态不同步,此时门限检测器将输出低电平,需要进行同步搜索。若误码个数占的比例较低,则输出高电平,说明此时系统已状态同步,不再进行同步搜索。
(2)并行输入与状态控制模块:当控制端为“0”时,该模块照原样将两组并行输入信号送到输出端,为“1”时,将所有输出信号置“0”。这时状态比较器的所有输入信号都电位相同并输出高电平,以表示系统已同步,进入同步保护状态。
(3)连“1”状态计数器模块:该模块的功能有两个:一是对状态比较器输出的连“1”状态进行计数,当计数器的计数量达到设置值时,计数器输出为“1”,并控制“并行输入与状态控制”电路,使各并行输出位置“0”。这样,状态比较器的各输入位都为“0”,则其输出为“1”,表示状态已同步;若状态不同步,则连“1”计数器的输出始终为“0”。连“1”计数器的另一功能是当其输出为“1”时,才使误码计数器进行计数。若在整个系统已同步后,出现了状态失步,则通过误码统计与门限电路的输出状态控制连“1”计数器。当连“1”个数到达设定的个数时输出为“1”,并送给并行输入与状态控制器,使其输出置为“0”,以实现同步保护控制。
1 发信机
发信机的主要功能是产生具有随机特性的伪随机m 序列,通过FPGA 由VHDL 编程实现。伪随机序列产生原理如下:
图1 伪随机序列产生原理图
其中,ak-i是各移位寄存器的状态,Ci对应各寄存器的反馈系数,为1表示参与反馈,为0不参与反馈。反馈函数为:
当级数n 和反馈系数一旦确定,则反馈移位寄存器的输出序列确定了,m序列的一个重要的性质是:任一m序列的循环移位仍是一个m序列,序列长度为m = 2n-1 。
2 接收机
接收机主要由时钟同步模块、状态同步模块组成,其功能框图如图2 所示。
图2 误码器接收机功能框图
2.1 时钟提取模块
本单元所采用的时钟提取方法是采用新的积分鉴相来实现的,通过在一个时钟周期内对码元进行积分,判断超前滞后,从而极大的降低了因干扰信号的出现导致误调的可能性。时钟提取的原理图如下:
图3 时钟提取原理图
(1 )鉴相器
导前- 滞后型数字鉴相器的特点是,它输出一个表示本地估算信号超前或滞后于输入信号的量.如果本地估算信号超前于输入信号,则输出“超前脉冲”, 以便利用该“超前脉冲”控制本地估算信号的相位推后。反之,则输出“滞后脉冲”,并使本地估算信号的相位前移. 导前- 滞后型数字鉴相器可分为微分型和积分型两种.由于积分型导前- 滞后数字鉴相器,具有优良的抗干扰性能. 因此本设计采用了积分型导前-滞后型数字鉴相器.
积分型导前-滞后型数字鉴相器中,本地时钟的上升沿为同相积分的清洗时刻,上升沿到来时,在本地高频时钟下,同相计数器开始计数,当输入码元是“1”时,每来一高频脉冲计数器加1计数,当输入码元是“0”时,每来一高频脉冲计数器减1计数。当下一上升沿到来时,将计数值输出,并清零计数器,计数器在高频脉冲下重新开始计数.本地时钟的下降沿为中相积分的清洗时刻,在下降沿到来时,在上述同样的高频时钟下,中相积分计数器开始计数,当码元为“1”时,计数器加1,当码元为“0”时,计数器减1。当下一下降沿到来时,将计数值输出,同时对计数器清零,重新计数。在准确同步的情况下,同相积分的积分区间正好和接收的一个码元宽度相重合,同相积分计数器输出为± T(+T表示码元为1,-T 表示码元为0),而中相积分器的输出为0 或± T.在中相积分周期内若码元出现0→1或1→0变化,则中相积分器输出为0。在中相积分周期内,若码元没有翻转,码元始终为“1”,则中相积分计数器输出为T。若码元始终为“0”,则中相积分计数器输出为-T。若本地估算时钟超前于输入码元,当同相积分计数器的输出大于0,则随后的中相积分计数器的输出也大于0,当同相积分计数器的输出小于0时,则随后的中相积分计数器的输出也小于0。当同相积分计数器输出为+T或-T时,随后的中相积分计数器输出也为+T或-T 时,表明是处于连“1”或连“0”状态,则超前或滞后标志都为0。若本地估算时钟滞后于输入码元,当同相积分计数器的输出大于0,则随后的中相积分计数器的输出小于0,当同相积分计数器的输出小于0时,则随后的中相积分计数器的输出将大于0 。
当下降沿到来时,先检测同相计数器的输出,当为0时,如果中相计数器的输出为0,则表示还没开始检测,就没有超前滞后信息。如果中相计数器的输出不为0,则表示本地估算的时钟刚好与待检测的时钟正交,处于超前和滞后分界处,在这里对其做超前处理。如果同相计数器的输出不为0,此时如果中相计数器的输出为0,则表示刚好两时钟同步,故没有超前和滞后信息。如果中相计数器的输出为土20,即为整个码元的长度。则表示中相计数过程始终为“1”或“0”,出现连“1”或连“0”状态,为防止误操作,同样认为没有超前和滞后。如果此时中相计数器的输出不为0,也不为整个码元,则将同相计数器的输出和中相计数器的输出的符号位进行异或,即两者符号相同表示超前,符号不同表示滞后。
(2)双相高频时钟源与停扣控制电路
双相高频时钟源是形成两路窄脉冲信号,两个窄脉冲信号刚好相差180 度。停扣控制电路主要由添门和扣门组成,当来一个超前脉冲,加到扣门,扣除一个晶体脉冲,这样分频器的输出脉冲相位就滞后了1/20周期。当来一个滞后脉冲,加到添门,控制添门打开,加入一个晶体脉冲到或门。由于加到添门的晶振信号与加到扣门的晶振信号的相位相差180度,因此当从添门加入一个晶振脉冲到或门时,相当于在扣门输出的晶振信号中间插入一个窄脉冲,也就使分频器输入端添加了一个脉冲,这样分频器的输出相位就提前了1/20周期。从而实现位同步。
2.2 状态同步模块
状态同步模块主要包括逐位比较检测模块、误码统计与门限检测模块、并行输入与状态控制模块、状态并行比较模块、连“1”状态计数器模块。
(1)误码统计与门限检测模块:在时钟的节拍下,对误码脉冲计数,同时对时钟脉冲进行计数。若误码个数占时钟个数的30% 以上,则认为误码率很高,说明系统两序列的状态不同步,此时门限检测器将输出低电平,需要进行同步搜索。若误码个数占的比例较低,则输出高电平,说明此时系统已状态同步,不再进行同步搜索。
(2)并行输入与状态控制模块:当控制端为“0”时,该模块照原样将两组并行输入信号送到输出端,为“1”时,将所有输出信号置“0”。这时状态比较器的所有输入信号都电位相同并输出高电平,以表示系统已同步,进入同步保护状态。
(3)连“1”状态计数器模块:该模块的功能有两个:一是对状态比较器输出的连“1”状态进行计数,当计数器的计数量达到设置值时,计数器输出为“1”,并控制“并行输入与状态控制”电路,使各并行输出位置“0”。这样,状态比较器的各输入位都为“0”,则其输出为“1”,表示状态已同步;若状态不同步,则连“1”计数器的输出始终为“0”。连“1”计数器的另一功能是当其输出为“1”时,才使误码计数器进行计数。若在整个系统已同步后,出现了状态失步,则通过误码统计与门限电路的输出状态控制连“1”计数器。当连“1”个数到达设定的个数时输出为“1”,并送给并行输入与状态控制器,使其输出置为“0”,以实现同步保护控制。
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 采用EEPROM对大容量FPGA芯片数据实现串行加载(03-18)
- 赛灵思:可编程逻辑不仅已是大势所趋,而且势不可挡(07-24)