电动摩托车无传感器无刷直流电机控制系统设计
时间:10-29
来源:互联网
点击:
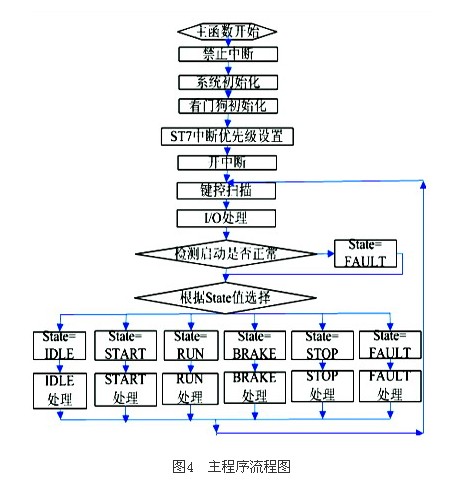
子程序模块包括i/o口初始化子程序、定时器a子程序、外围设备初始化子程序、看门狗初始化和刷新子程序、a/d转换子程序、电机预定位子程序、运放设置子程序、闭环调节子程序、周期转频率子程序等。各模块相对独立又通过一定的参数出入口联系。
中断程序
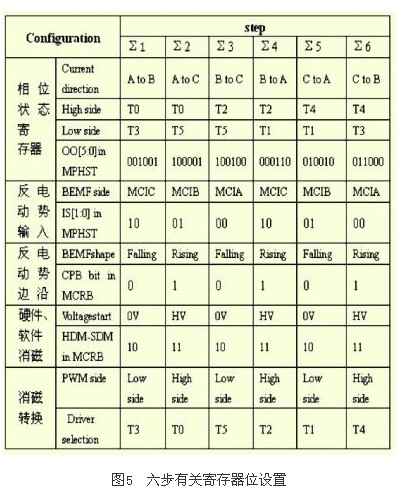
中断程序包括定时器a的中断处理程序、换相和消磁中断处理程序、速率更新中断处理程序、过零检测中断处理程序等。此无刷直流电机采用典型的六步控制方式来进行控制,这部分程序嵌入到换相与中断处理程序中去,六步控制的相关寄存器设置见图5所示。
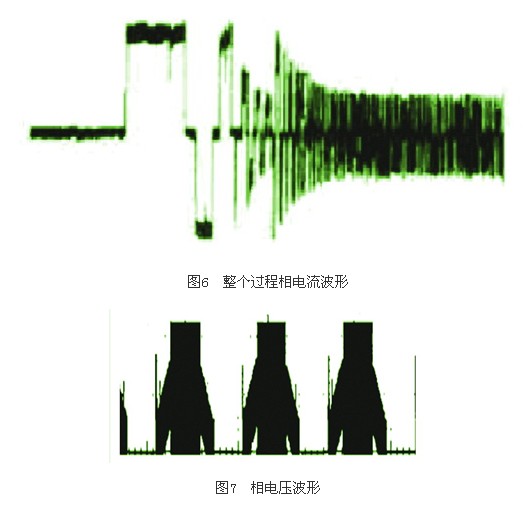
采用上述理论,这里采用austere48v无刷直流电机,启动最大电流18a,正常运行时10-15a,结合相关硬件和软件设计,已经成功地实现了对电动摩托车上无位置传感器无刷直流电机控制。实验结果表明,在电源电压一定的情况下,随着控制信号pwm波占空比不断增大,电动机上的平均电压随之变大,速度亦相应上升。图6为整个过程的相电流波形,图7为正常运行时的相电压波形。图6中过程可以分析如下:电机采用三步启动方式,先进行转子预定位,然后同步加速,加速到一定阶段后可以检测到反电动势,当检测到两个反电动势后进入自动切换模式,此时先用电流模式,然后切换到电压模式由转把控制占空比以控制电机速度。
作为有着广泛市场前景和巨大社会效益的新型绿色交通工具,电动摩托车日益受到各生产厂家、研究机构、广大消费者的喜爱。本文介绍了以意法公司生产的st7fmc1k2专用电机控制芯片设计了一套无位置传感器无刷直流电机控制系统。实验结果表明,此设计到达了很好的控制效果,同时它简化了系统线路,减小控制器体积,提高了系统运行效率,增长了寿命,加强了灵活性和可靠性,具有好的市场推广价值。
电动机 电子 传感器 电路 单片机 电流 电压 看门狗 放大器 比较器 电路图 电力电子 逆变器 二极管 相关文章:
- 混合电动车电动机的MotorSolve设计技巧(02-13)
- 未来汽车电动机或将取代汽油机(01-15)
- 图解混合动力/电动车逆变器模块(07-28)
- 基于CAN 总线的电动汽车电源管理通信系统设计(07-29)
- MCU为电动自行车提供有效的驱动(08-07)
- 剖析GM的VOLT车(08-05)