面向计算体系结构的电机控制
时间:01-06
来源:互联网
点击:
振动控制
FOC 的优点之一是能够控制振动及其伴随噪声。这类测量提高了能效和机械可靠性,有可能不需要太多的机械设计。在消费类市场上,这能够把 600 美元的洗衣机抬高到售价 800 美元的豪华型。
原理还是那么简单。如果振动的原因是控制环不稳定造成的,那么您可以改变 PI 控制器的增益,使其更接近临界阻尼。如果振动是由电机、驱动转轴或者负载机械共振造成的,您可以通过吸收扭矩信号共振频率功率来消除振动。比较方便的是,FOC 方法使您能够在扭矩信号变成三路时变正弦信号之前访问它,因此,增加陷波滤波器吸收共振频率功率就可以了。
不论哪一操作 — 增加增益环还是滤除错误信号,都会对系统动态速度和位置误差产生不利影响。但是在很多应用中,对于平滑安静的操作,转轴速度的瞬时误差并不重要。
振动控制需要三种主要的处理模块:快速傅里叶变换 (FFT),从转轴位置或者绕组电流数据中提取出频谱,探测和响应模块,找到频谱最大值,确定怎样处理它们,还有一个或者更多的可编程陷波滤波器,去掉扭矩信号中的杂波频率 (图 3) 。
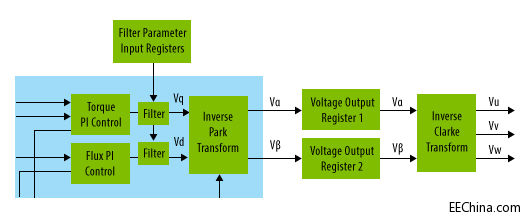
图 3.扭矩控制器和 Park 反变换之间的可编程陷波滤波器能够改进系统的共振。
这些模块都适合应用。在某些系统中,共振是固定的,或者慢变的,FFT 会是启动或者后台任务。在共振变化很快的系统中,FFT 需要连续运行。响应模块与应用有很大的关系,确定对 PI 环路增益的调整,增加滤波器,选择滤波器参数等,在很大程度上取决于整个电机系统的特性。因此,在没有详细了解系统的情况下,不太可能估算振动控制所需要的计算负载。
工作堆叠
目前为止我们已经进行了很多工作,每一16 kHz周期可能有几百项算术指令 — 还有 FFT 计算。我们所面临的是,任务的增长已经超出了低成本MCU的简单中断服务。但还有更多。
最明显的是增加了很多电机。很多控制任务本质上都是多轴的:例如,粉碎机的工具位置,或者全关节机器人手等。在集成级,在轴上需要共享实时数据等,就能够体现多通道控制器的优点。但是由于轴之间有很少的冗余计算,因此,更多的通道只是增加了工作负载。
还有采样率。目前的采样率从以前的搜索RMS位置或者速度误差的 16 kHz 标准,增长到 100 kHz。自然的,提高采样间隔会减少完成实时计算的时间,必须在采样间隔期间完成实时计算。
工厂之外的变化也对控制器体系结构带来了压力:子系统联网了。一个主要的转换点是设计中增加了工业网络接口。逐渐的,系统设计人员希望通过网络发送命令,检查状态,读取日志数据。网络接口不仅增加了必要的物理层和介质访问硬件,而且还有异步执行的协议栈,与控制环的同步采样活动是异步的。现在,我们不仅有简单的中断触发实时任务,还有时间限制的两项任务,一个实时的,一个面向网络的。在这一点,很难不采用 RTOS。
网络访问随之而来的是容易受到攻击。对联网控制系统进行攻击,不论是否直接连接互联网,都有可能受到黑客的攻击。没有绝对的安全。相应的,即使是看起来不太重要的电机控制器的子系统今后也要受到保护。这意味着,它们必须有本地认证消息,以及加密和解密数据。这通常表明需要加密加速器。
因此,这就回答了我们最初的问题。我们看到 PMSM 控制器在增加,更多的特性在软件中实现,从低成本 MCU 的简单任务到某些任务所需要的硬件加速的大量计算。我们注意到需要 FFT、有限冲击响应 (IIR) 滤波器、网络接口,以及随之而来的安全功能。非对称多处理逐渐成为提供足够计算能力并保持实时和后台任务相互隔离最好的方法。
计算环境已经从中断驱动的裸金属代码扩展到复杂环境工作负载,这具有很多难以处理的实时任务,以及某些通信相关的背景任务,其中的一些会有工业网络时限要求。这么复杂的需求需要采用 RTOS。我们看到安全要求内核可信。不论是在 FPGA 中实现还是采用基于单元的技术实现,我们的小电机控制器都是一种很好的异构多核 SoC。
FOC 的优点之一是能够控制振动及其伴随噪声。这类测量提高了能效和机械可靠性,有可能不需要太多的机械设计。在消费类市场上,这能够把 600 美元的洗衣机抬高到售价 800 美元的豪华型。
原理还是那么简单。如果振动的原因是控制环不稳定造成的,那么您可以改变 PI 控制器的增益,使其更接近临界阻尼。如果振动是由电机、驱动转轴或者负载机械共振造成的,您可以通过吸收扭矩信号共振频率功率来消除振动。比较方便的是,FOC 方法使您能够在扭矩信号变成三路时变正弦信号之前访问它,因此,增加陷波滤波器吸收共振频率功率就可以了。
不论哪一操作 — 增加增益环还是滤除错误信号,都会对系统动态速度和位置误差产生不利影响。但是在很多应用中,对于平滑安静的操作,转轴速度的瞬时误差并不重要。
振动控制需要三种主要的处理模块:快速傅里叶变换 (FFT),从转轴位置或者绕组电流数据中提取出频谱,探测和响应模块,找到频谱最大值,确定怎样处理它们,还有一个或者更多的可编程陷波滤波器,去掉扭矩信号中的杂波频率 (图 3) 。
图 3.扭矩控制器和 Park 反变换之间的可编程陷波滤波器能够改进系统的共振。
这些模块都适合应用。在某些系统中,共振是固定的,或者慢变的,FFT 会是启动或者后台任务。在共振变化很快的系统中,FFT 需要连续运行。响应模块与应用有很大的关系,确定对 PI 环路增益的调整,增加滤波器,选择滤波器参数等,在很大程度上取决于整个电机系统的特性。因此,在没有详细了解系统的情况下,不太可能估算振动控制所需要的计算负载。
工作堆叠
目前为止我们已经进行了很多工作,每一16 kHz周期可能有几百项算术指令 — 还有 FFT 计算。我们所面临的是,任务的增长已经超出了低成本MCU的简单中断服务。但还有更多。
最明显的是增加了很多电机。很多控制任务本质上都是多轴的:例如,粉碎机的工具位置,或者全关节机器人手等。在集成级,在轴上需要共享实时数据等,就能够体现多通道控制器的优点。但是由于轴之间有很少的冗余计算,因此,更多的通道只是增加了工作负载。
还有采样率。目前的采样率从以前的搜索RMS位置或者速度误差的 16 kHz 标准,增长到 100 kHz。自然的,提高采样间隔会减少完成实时计算的时间,必须在采样间隔期间完成实时计算。
工厂之外的变化也对控制器体系结构带来了压力:子系统联网了。一个主要的转换点是设计中增加了工业网络接口。逐渐的,系统设计人员希望通过网络发送命令,检查状态,读取日志数据。网络接口不仅增加了必要的物理层和介质访问硬件,而且还有异步执行的协议栈,与控制环的同步采样活动是异步的。现在,我们不仅有简单的中断触发实时任务,还有时间限制的两项任务,一个实时的,一个面向网络的。在这一点,很难不采用 RTOS。
网络访问随之而来的是容易受到攻击。对联网控制系统进行攻击,不论是否直接连接互联网,都有可能受到黑客的攻击。没有绝对的安全。相应的,即使是看起来不太重要的电机控制器的子系统今后也要受到保护。这意味着,它们必须有本地认证消息,以及加密和解密数据。这通常表明需要加密加速器。
因此,这就回答了我们最初的问题。我们看到 PMSM 控制器在增加,更多的特性在软件中实现,从低成本 MCU 的简单任务到某些任务所需要的硬件加速的大量计算。我们注意到需要 FFT、有限冲击响应 (IIR) 滤波器、网络接口,以及随之而来的安全功能。非对称多处理逐渐成为提供足够计算能力并保持实时和后台任务相互隔离最好的方法。
计算环境已经从中断驱动的裸金属代码扩展到复杂环境工作负载,这具有很多难以处理的实时任务,以及某些通信相关的背景任务,其中的一些会有工业网络时限要求。这么复杂的需求需要采用 RTOS。我们看到安全要求内核可信。不论是在 FPGA 中实现还是采用基于单元的技术实现,我们的小电机控制器都是一种很好的异构多核 SoC。
Altera MCU 机器人 电流 编码器 电压 传感器 电阻 电感 滤波器 FPGA SoC 相关文章:
- 如何充满信心地设计军用SDR产品(07-25)
- 基于 SoPC 的震动信号采集设备设计(08-14)
- 基于TMS320C6416T的CPCI信号处理板设计(12-01)
- 基于FPGA和USB2.0的高速数据采集系统(01-13)
- 图像采集系统的Camera Link标准接口设计(01-16)
- 激光微加工系统及基于DSP+FPGA的控制单元的研究(03-05)