NLX230型模糊控制器及其嵌入式应用研究
时间:12-08
来源:互联网
点击:
结果与用户定义的宽度相比较,5位的宽度值代表输入离中心位置的最远距离,如果输入的距离小于或等于此宽度,那么输入被认为是隶属函数的一部分,距离的求补得到隶属函数度。求补就是30减去距离(30是最大宽度,)输入离中心越近,隶属值越高,落在宽度内的隶属值被传到最小比较器来进行规则处理。
当输入等于中心值时,模糊单元输出最大值31;当输入落在宽度范围以外时,模糊输出值为0,表示完全没有关系。
3.2 最小值比较器和最大值比较器NLX230的最小值比较器是由高流通量的神经元网路执行的,以适合高速的数据量。64条规则分别存储在64个规则寄存器中,每个规则寄存器字有24位,其前16位分别用来完成每个模糊单元的输出对最小比较器的使能。每个规则位固定对应1个模糊单元。当1个规则位被置1,则此规则包含该项,相应的模糊单元输出可与其他置1的规则位相比较以找出最小项。
某个规则的最小项一旦被找到,就储存在NLX230最大值比较器的暂存寄存器中,对应被处理的每一规则经处理所得最小项与暂存于最大值寄存器中的值进行比较,去小存大;当处理完所有规则,最大值寄存器中的结果是所有最小项中的最大值,该值对应的规则为取胜规则,代表1个"模糊"逻辑各结果的和。取胜规则的当前值(动作值)送到模糊量与确值量的转换单元(输出寄存器),经转换处理后进行模糊控制。
当前值定义在每个规则寄存器字的8个保留位,代表输出动作值所需的修正量,动作修正值是1个8位二进制补码值为-128~127。从规则寄存器字来的8位动作修正值与用户定义的初值相加。例如,初始值为100,动作修正值为-5,则输出为95。
3.3 规则寄存器和输出寄存器规则寄存器用于存放控制规则,NLX230最多可存放64条规则。输出寄存器为总线使能方式,只要处理了所有的规则,规则寄存器的8位补码修正值与初始值之和,饱和算数运算使输出位取模128(当前值使输出高于或低于界限-128和127),输出即由模糊量转换为确值量,模糊控制器在输入下一组数据的同时输出结果数据。
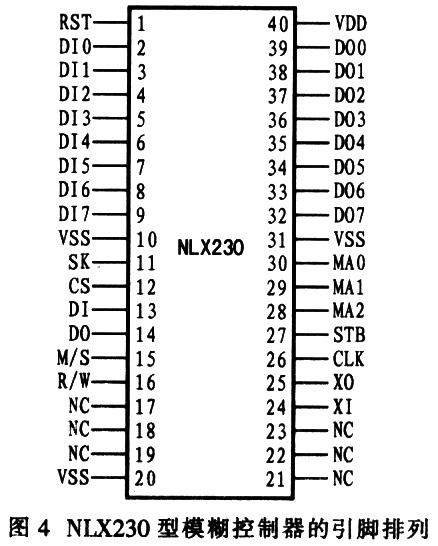
3.4 NLX230的引脚功能NLX230采用40引脚双列直插式封装,如图4所示。RST是系统复位脚,低电平有效。DI0-DI7是8位数据输入口。VSS是地。SK是串行时钟脚,用于将组态数据打入FMC(M/S=0时,该脚输出)。CS是片选,与M/S和R/W联用使能串行数据输入/输出(M/S=1时输出,M/S=0时输入)。DI是串行数据输入脚。DO是串行数据输出脚。M/S是主/从模式选择(M/S=1时为主动模式;M/S=0时为伺服模式)。R/W是读/写输入脚,仅用于伺服模式(R=1为读;W=0为写)。NC是空脚,必须接地。XI为晶体振荡器输入脚。XO为晶体振荡器输出脚。CLK是缓冲系统时钟输出脚。STB是选通脚,与MA0-MA2联用以选通输入/输出数据。MA2是输入/输出多路传输地址2输出脚。MA1是输入/输出多路传输地址位1输出脚。MA0是输入/输出多路传输地址位0输出脚。DO7-DO0为数据输出脚。VDD是+5V电源脚。
4 NLX230模糊控制器的工作模式NLX230模糊控制器的工作模式有模糊单元模式、输入模式、输出模式及输入输出扩展应用。
4.1 模糊单元模式在模糊单元模式下有二种方式,典型应用为模糊单元的输出表示每一个输入接近中心位置的程度;另一种方式是将NLX230组态成为不包含模糊单元,通过使用不包含模糊单元的工作方式可用输入与中心位置的距离来加权规则项。
4.2 输入模式NLX230的输入即可以是来自8个分时多路输入引脚的信号又可以是输出的内部反馈信号,二种输入模式通过输入组态寄存器选择。
4.3 输出模式NLX230的每个输出可以配置为立即输出和累加输出二种组态。在立即输出模式中,由取胜规则(该规则带有最大的最小项)所特指的动作值加上初始值。对NLX230的工作周期,原始的初始值都被用来计算输出。在累加输出模式中,1个输出的新值是加了新动作值(此动作值由获胜规则所决定)的现在值。在这个模式中,新输入值被保留作为初始我用于下1个输出值的计算。用户定义的原始初始值仅在复位后计算第一个输出值时被使用。
4.4 扩展多个NLX230级联使用能够扩展输入、输出、模糊单元和规则的数目。
4.5 时钟1个外部时钟源从XI引脚输入可直接驱动NLX230。NLX230也包含了1个有源振荡器电路用于时钟的发生。CLK提供了所需的时钟输出。
5 NLX230的操作方式NLX230的操作模式通过初始化完成。复位引脚M/S可设置2种不同结构的操作方式:主动方式(NLX230自动从外部EEPROM中读取数据)和从动方式(NLX230等待外部逻辑电路读写数据)。
5.1 主动方式主动方式是在复位
当输入等于中心值时,模糊单元输出最大值31;当输入落在宽度范围以外时,模糊输出值为0,表示完全没有关系。
3.2 最小值比较器和最大值比较器NLX230的最小值比较器是由高流通量的神经元网路执行的,以适合高速的数据量。64条规则分别存储在64个规则寄存器中,每个规则寄存器字有24位,其前16位分别用来完成每个模糊单元的输出对最小比较器的使能。每个规则位固定对应1个模糊单元。当1个规则位被置1,则此规则包含该项,相应的模糊单元输出可与其他置1的规则位相比较以找出最小项。
某个规则的最小项一旦被找到,就储存在NLX230最大值比较器的暂存寄存器中,对应被处理的每一规则经处理所得最小项与暂存于最大值寄存器中的值进行比较,去小存大;当处理完所有规则,最大值寄存器中的结果是所有最小项中的最大值,该值对应的规则为取胜规则,代表1个"模糊"逻辑各结果的和。取胜规则的当前值(动作值)送到模糊量与确值量的转换单元(输出寄存器),经转换处理后进行模糊控制。
当前值定义在每个规则寄存器字的8个保留位,代表输出动作值所需的修正量,动作修正值是1个8位二进制补码值为-128~127。从规则寄存器字来的8位动作修正值与用户定义的初值相加。例如,初始值为100,动作修正值为-5,则输出为95。
3.3 规则寄存器和输出寄存器规则寄存器用于存放控制规则,NLX230最多可存放64条规则。输出寄存器为总线使能方式,只要处理了所有的规则,规则寄存器的8位补码修正值与初始值之和,饱和算数运算使输出位取模128(当前值使输出高于或低于界限-128和127),输出即由模糊量转换为确值量,模糊控制器在输入下一组数据的同时输出结果数据。
3.4 NLX230的引脚功能NLX230采用40引脚双列直插式封装,如图4所示。RST是系统复位脚,低电平有效。DI0-DI7是8位数据输入口。VSS是地。SK是串行时钟脚,用于将组态数据打入FMC(M/S=0时,该脚输出)。CS是片选,与M/S和R/W联用使能串行数据输入/输出(M/S=1时输出,M/S=0时输入)。DI是串行数据输入脚。DO是串行数据输出脚。M/S是主/从模式选择(M/S=1时为主动模式;M/S=0时为伺服模式)。R/W是读/写输入脚,仅用于伺服模式(R=1为读;W=0为写)。NC是空脚,必须接地。XI为晶体振荡器输入脚。XO为晶体振荡器输出脚。CLK是缓冲系统时钟输出脚。STB是选通脚,与MA0-MA2联用以选通输入/输出数据。MA2是输入/输出多路传输地址2输出脚。MA1是输入/输出多路传输地址位1输出脚。MA0是输入/输出多路传输地址位0输出脚。DO7-DO0为数据输出脚。VDD是+5V电源脚。
4 NLX230模糊控制器的工作模式NLX230模糊控制器的工作模式有模糊单元模式、输入模式、输出模式及输入输出扩展应用。
4.1 模糊单元模式在模糊单元模式下有二种方式,典型应用为模糊单元的输出表示每一个输入接近中心位置的程度;另一种方式是将NLX230组态成为不包含模糊单元,通过使用不包含模糊单元的工作方式可用输入与中心位置的距离来加权规则项。
4.2 输入模式NLX230的输入即可以是来自8个分时多路输入引脚的信号又可以是输出的内部反馈信号,二种输入模式通过输入组态寄存器选择。
4.3 输出模式NLX230的每个输出可以配置为立即输出和累加输出二种组态。在立即输出模式中,由取胜规则(该规则带有最大的最小项)所特指的动作值加上初始值。对NLX230的工作周期,原始的初始值都被用来计算输出。在累加输出模式中,1个输出的新值是加了新动作值(此动作值由获胜规则所决定)的现在值。在这个模式中,新输入值被保留作为初始我用于下1个输出值的计算。用户定义的原始初始值仅在复位后计算第一个输出值时被使用。
4.4 扩展多个NLX230级联使用能够扩展输入、输出、模糊单元和规则的数目。
4.5 时钟1个外部时钟源从XI引脚输入可直接驱动NLX230。NLX230也包含了1个有源振荡器电路用于时钟的发生。CLK提供了所需的时钟输出。
5 NLX230的操作方式NLX230的操作模式通过初始化完成。复位引脚M/S可设置2种不同结构的操作方式:主动方式(NLX230自动从外部EEPROM中读取数据)和从动方式(NLX230等待外部逻辑电路读写数据)。
5.1 主动方式主动方式是在复位
电路 振荡器 嵌入式 机器人 传感器 比较器 总线 单片机 电动汽车 相关文章:
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)