多电平变频器无速度传感器直接转矩控制的研究
时间:12-07
来源:互联网
点击:
4 STS-SVM无速度传感器DTC系统
相对于普通的多电平空间矢量算法,STS-SVM控制算法简单,开关负荷均衡,使得主控制器实现复杂的无速度传感器直接转矩控制等算法成为可能。
图3为基于STS-SVM的级联多电平无速度传感器DTC控制系统的总体结构。图中速度调节器、转矩调节器、磁链调节器均为比例积分调节,转矩调节器需要在PI调节前采用限幅,以免过大的转矩误差造成过电流冲击。系统总采用STS-SVM模块产生PWM波控制逆变器的开关状态,摒弃了复杂的开关矢量表。另外,由于未使用滞环比较,系统的采样频率是固定的,更易于数字实现。
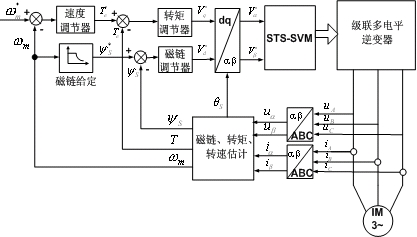
图3 基于STS-SVM的无速度传感器DTC系统结构
4.1 STS-SVM调制的多电平逆变器
此处,多电平逆变器为图4(a)所示的三级H桥级联型拓扑。STS-SVM模型中的驱动信号的产生通过两电平空间矢量算法得出的调制波与各个开关管对应的三角波进行比较来获得,如图4(b)所示。各个三角载波存在一定的移相关系,这样就等效地实现了采样周期的相互错开。
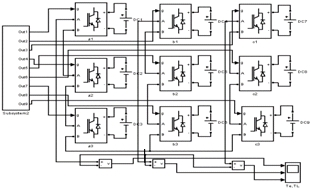
(a) 三级级联多电平逆变器主电路
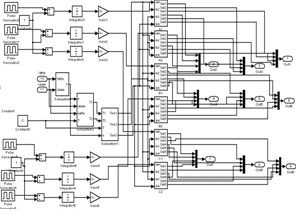
(b)STS-SVM驱动信号产生单元
图4 级联多电平主电路与PWM产生单元
4.2 磁链与转矩观测
定子磁链的估计大体上可以分为三种模型,即u-i模型,i-n模型,u-n模型。其中u-i模型中磁链表达式为
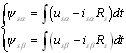 (1)
(1)
其中,,us,is,Rs分别为定子磁链、电压、电流值与定子电阻值,可见,u-i模型观测定子磁链无需转速信息,唯一所需了解的电动机参数是定子电阻Rs,因此十分适合在此处应用。
直接转矩控制需要实测电磁转矩Te作为反馈量,一般采用计算法。电磁转矩具有多种不同的表达式,可以采用定子电流、转子电流、定子磁链、转子磁链中的任意2个参数来获得电磁转矩。在直接转矩控制中,通常采用如下的公式计算Te:
 (2)
(2)
其中,Pn为电机的极对数。
在Matlab/Simulink中建立磁链与转矩观测的模型,如图5所示。
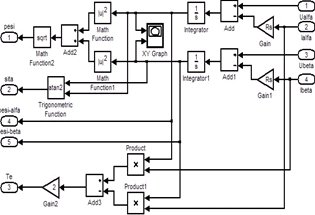
图5 定子磁链与转矩观测模型
4.3 速度估计
基于模型参考自适应系统(Model Reference Adaptive System,MRAS)的转速辨识实现较为方便,且具有对转子电阻变化的完全不敏感性,电机参数变化对转速估算的影响也较小。转子磁链的电压模型与电机转速无关,而转子磁链的电流模型与电机转速有关,因此选择转子磁链的电压模型作为参考模型,而选择转子磁链的电流模型作为可调模型。
由于在磁链观测中已经估算出定子磁链,因此参考模型可以用定子磁链表示:
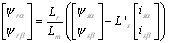 (3)
(3)
其中,

为转子磁链,Lm为定转子互感, Lr为转子电感,

为定子瞬时电感, Ls为定子电感。
可调模型为:
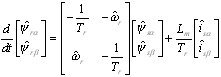 (4)
(4)
其中Tr=Lr/Rr为转子时间常数,Rr为转子电阻,

为转子角速度。
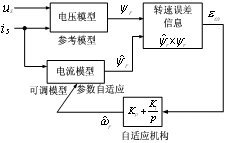
图6 利用转子磁链估计转速的MRAS方案
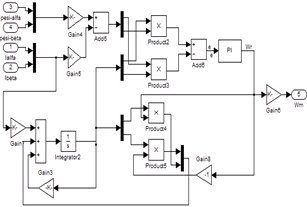
图7 转速估计模型
定义广义状态误差

,利用Popov超稳定准则可推导出自适应率形式为:
 (5)
(5)
其中,Kp、Ki分别为比例和积分系数, 是取之于的误差信息,
 (6)
(6)
由式(6)可以看出,磁链误差信息比例于转子磁链矢量 和 之间的角偏差αr, 经过PI调节器可产生速度信号 ,这个调整信号会使可调模型估计的
,这个调整信号会使可调模型估计的 与参考模型的
与参考模型的 趋于一致,令转子磁链误差 能够收敛于零,也就会使转速估计值
趋于一致,令转子磁链误差 能够收敛于零,也就会使转速估计值 逐步逼近于真实值,其原理如图6所示。图7为利用转子磁链估计转速的MRAS的Matlab/Si mulink模型。
逐步逼近于真实值,其原理如图6所示。图7为利用转子磁链估计转速的MRAS的Matlab/Si mulink模型。
5 仿真结果及分析
在Matlab/Simulink中建立了整个系统的仿真模型。其中,电机模型采用软件自带的两级三相异步感应电机模型,参数为:额定功率PN =3730W,额定线电压UN =380V,额定频率fN =50Hz,转子电阻Rr=1.083Ω,定子电阻Rs=1.115Ω,定子、转子电感Ls= Lr=0.2097H,定转子互感Lm=0.2037H,转动惯量J=0.02kgg㎡。逆变器每级直流电源电压为104V,采样周期Ts=952μs。
仿真中,给定转速 ,电机空载启动,在0.3s处突加6Ngm的负载。各个变量的仿真波形如图8所示。
,电机空载启动,在0.3s处突加6Ngm的负载。各个变量的仿真波形如图8所示。
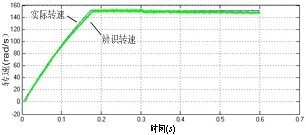
(a)辨识转速与实际转速

(b)转矩动态相应
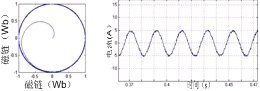
(c)定子磁链(d)电流
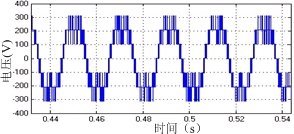
(e)相电压
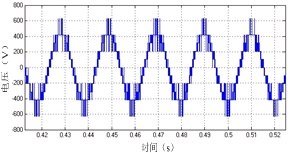
(f)线电压
图8 系统仿真波形
由仿真波形可以看出,电机启动后0.2s,系统基本进入稳定状态;辨识转速能较好地估计与跟踪实际转速;相电压输出7电平;线电压输出13电平;电流波形良好;稳态时磁链与转矩脉动都比较小;启动过程中定子磁链能很快达到给定值,并保持圆形;启动时转矩迅速达到限幅值(23Ngm),之后逐渐回落到空载稳定值,加载时动态响应特性良好。
6 结论
本文将错时采样空间矢量调制方法、模型参考自适应方法与直接转矩控制相结合,实现了级联多电平变频器的无速度传感器直接转矩控制,有实现简单、可靠性高、转矩脉动小等诸多优点,具有较好的实用价值。文中给出了各个部分的建模方法,通过仿真对这一方法进行了验证。
相对于普通的多电平空间矢量算法,STS-SVM控制算法简单,开关负荷均衡,使得主控制器实现复杂的无速度传感器直接转矩控制等算法成为可能。
图3为基于STS-SVM的级联多电平无速度传感器DTC控制系统的总体结构。图中速度调节器、转矩调节器、磁链调节器均为比例积分调节,转矩调节器需要在PI调节前采用限幅,以免过大的转矩误差造成过电流冲击。系统总采用STS-SVM模块产生PWM波控制逆变器的开关状态,摒弃了复杂的开关矢量表。另外,由于未使用滞环比较,系统的采样频率是固定的,更易于数字实现。
图3 基于STS-SVM的无速度传感器DTC系统结构
4.1 STS-SVM调制的多电平逆变器
此处,多电平逆变器为图4(a)所示的三级H桥级联型拓扑。STS-SVM模型中的驱动信号的产生通过两电平空间矢量算法得出的调制波与各个开关管对应的三角波进行比较来获得,如图4(b)所示。各个三角载波存在一定的移相关系,这样就等效地实现了采样周期的相互错开。
(a) 三级级联多电平逆变器主电路
(b)STS-SVM驱动信号产生单元
图4 级联多电平主电路与PWM产生单元
4.2 磁链与转矩观测
定子磁链的估计大体上可以分为三种模型,即u-i模型,i-n模型,u-n模型。其中u-i模型中磁链表达式为
(1)其中,,us,is,Rs分别为定子磁链、电压、电流值与定子电阻值,可见,u-i模型观测定子磁链无需转速信息,唯一所需了解的电动机参数是定子电阻Rs,因此十分适合在此处应用。
直接转矩控制需要实测电磁转矩Te作为反馈量,一般采用计算法。电磁转矩具有多种不同的表达式,可以采用定子电流、转子电流、定子磁链、转子磁链中的任意2个参数来获得电磁转矩。在直接转矩控制中,通常采用如下的公式计算Te:
(2)其中,Pn为电机的极对数。
在Matlab/Simulink中建立磁链与转矩观测的模型,如图5所示。
图5 定子磁链与转矩观测模型
4.3 速度估计
基于模型参考自适应系统(Model Reference Adaptive System,MRAS)的转速辨识实现较为方便,且具有对转子电阻变化的完全不敏感性,电机参数变化对转速估算的影响也较小。转子磁链的电压模型与电机转速无关,而转子磁链的电流模型与电机转速有关,因此选择转子磁链的电压模型作为参考模型,而选择转子磁链的电流模型作为可调模型。
由于在磁链观测中已经估算出定子磁链,因此参考模型可以用定子磁链表示:
(3)其中,
为转子磁链,Lm为定转子互感, Lr为转子电感,
为定子瞬时电感, Ls为定子电感。
可调模型为:
(4)其中Tr=Lr/Rr为转子时间常数,Rr为转子电阻,
为转子角速度。
图6 利用转子磁链估计转速的MRAS方案
图7 转速估计模型
定义广义状态误差
,利用Popov超稳定准则可推导出自适应率形式为:
(5)其中,Kp、Ki分别为比例和积分系数, 是取之于的误差信息,
(6)由式(6)可以看出,磁链误差信息比例于转子磁链矢量 和 之间的角偏差αr, 经过PI调节器可产生速度信号
,这个调整信号会使可调模型估计的与参考模型的趋于一致,令转子磁链误差 能够收敛于零,也就会使转速估计值逐步逼近于真实值,其原理如图6所示。图7为利用转子磁链估计转速的MRAS的Matlab/Si mulink模型。5 仿真结果及分析
在Matlab/Simulink中建立了整个系统的仿真模型。其中,电机模型采用软件自带的两级三相异步感应电机模型,参数为:额定功率PN =3730W,额定线电压UN =380V,额定频率fN =50Hz,转子电阻Rr=1.083Ω,定子电阻Rs=1.115Ω,定子、转子电感Ls= Lr=0.2097H,定转子互感Lm=0.2037H,转动惯量J=0.02kgg㎡。逆变器每级直流电源电压为104V,采样周期Ts=952μs。
仿真中,给定转速
,电机空载启动,在0.3s处突加6Ngm的负载。各个变量的仿真波形如图8所示。(a)辨识转速与实际转速
(b)转矩动态相应
(c)定子磁链(d)电流
(e)相电压
(f)线电压
图8 系统仿真波形
由仿真波形可以看出,电机启动后0.2s,系统基本进入稳定状态;辨识转速能较好地估计与跟踪实际转速;相电压输出7电平;线电压输出13电平;电流波形良好;稳态时磁链与转矩脉动都比较小;启动过程中定子磁链能很快达到给定值,并保持圆形;启动时转矩迅速达到限幅值(23Ngm),之后逐渐回落到空载稳定值,加载时动态响应特性良好。
6 结论
本文将错时采样空间矢量调制方法、模型参考自适应方法与直接转矩控制相结合,实现了级联多电平变频器的无速度传感器直接转矩控制,有实现简单、可靠性高、转矩脉动小等诸多优点,具有较好的实用价值。文中给出了各个部分的建模方法,通过仿真对这一方法进行了验证。
电路 逆变器 比较器 电流 传感器 电压 仿真 PWM 变压器 电阻 电动机 电感 相关文章:
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)