基于提升小波的毫米波信号实时去噪
时间:01-26
来源:互联网
点击:

表2 各小波算法复杂度比较
毫米波探测器信号处理的实时性要求为:在采样数据下次更新前要完成信号去噪、特征提取、目标识别等功能。考虑3层小波变换的5/3小波软阈值函数法去噪算法,设需处理的数据个数为N,且N为2的整数次幂。由5/3小波的算法步骤可知,第i(i=1,2,3)层小波变换的加法和移位算次数为:5N/2i-1和2N/2i-1。信号重构时的运算量同分解时,阈值函数对小波系数处理时包括阈值的确定和系数的处理。确定阈值时首先对小波系数的绝对值排序(和大小顺序无关),其运算量为∑N/2i(N/2i-1)次判断和3∑N/2i(N/2i-1)次赋值(即数据在存储空间的地址交换);因小波系数的个数皆为偶数,中值取排序后中间两数的平均值,故计算中值时的多了3次加法和3次移位;利用前述阈值计算公式计算阈值的运算量为3次乘法和3次移位;小波系数处理的运算量最大为N/2i次判断和N/2i次加法。那么信号去噪算法的总运算量为2∑(5N/2i-1)+∑N/2i+3次加法、2∑(2N/2i-1)+3次移位、3次乘法、3∑N/2i(N/2i-1)次赋值、∑N/2i(N/2i-1)+∑N/2i次判断。
实际信号处理系统中,信号采样间隔为100μs,处理器每次处理64个采样点,采用数据流方式,每次处理更新一个点。通用定点DSP可以在单指令周期完成加法、移位、乘法、乘加、判断及赋值运算。算法所需总的处理器指令周期数是上述运算次数的总和,即6841个指令周期。那么系统要求处理器的运算速度最低为6841/1e-4=68.41MIPS。若考虑其它控制指令的执行、信号的特征提取、目标识别及采用C语言编程时编译器的编译效率,则对处理器的运算速度要求更高,经实验,系统要求处理器最低运算速度为160MIPS。
美国TI公司的TMS320VC5509A型32位定点DSP具有运算速度快、精度高、编程灵活、功耗低、外设资源丰富、集成度高、体积小、外围电路简单等特点,其最高运算速度为200MIPS,可以满足3mm波段毫米波探测器的信号处理系统实时性及小型化的要求。本设计选用此款DSP构建了3mm波段毫米波探测器信号处理的硬件平台,系统框图如图3所示。
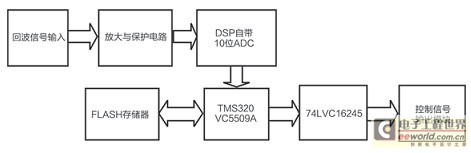
图3 信号处理系统框图
5 结语
通过比较9/7-F小波、CDF9/7小波、5/3小波在3mm波段毫米波探测器回波信号去噪中的效果及算法复杂度,选用运算只涉及整数加法和移位的整数5/3小波,具体分析了算法实现时对硬件平台处理速度的要求,选用TMS320VC5509A型DSP构建了探测器信号处理系统的硬件平台,并成功实现了回波信号实时去噪。经多次实验,此成果已应用于实际工程产品中。
FPGA DSP 滤波器 仿真 matlab MIPS C语言 电路 相关文章:
- 电源管理总线的结构与优势(11-19)
- 新型灌封式6A至12A DC-DC μModule稳压器系列(11-19)
- 低电压PLD/FPGA的供电设计(01-24)
- 基于FPGA的高精度数字电源(02-12)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)
- 具有多个电压轨的FPGA和DSP电源设计实例(05-22)