传感器网络中实时通信的研究
时间:10-12
来源:互联网
点击:
3.1 设备请求GTS的响应时间模型
分析中,假设每个设备申请GTS只占一个时隙(IEEE 802.15.4中允许一个GTS占用连续多个时隙)。假设网络中只有一个设备需要GTS传输,采用PETRI网为传感器网络建立关于延迟模型如图5所示。
图 5中,t1处加入时间控制,用来仿真数据包到达,由传感器周期性采样的性质,选择间隔为常数的分布,参数为λ,表示每秒到达信息包个数。根据采样时间,将传感器分为2种:一种是周期传感器;另一种是事件驱动传感器。采用周期采样,一般探测周期为300 ms,于是,λ=300 ms。
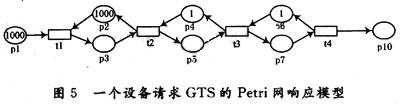
在 t4时间加入常数分布的时间控制,均值为μ,根据文献计算,aBaseSlotDuration=60 symbols,datarate=62.5 ksymbols/s(2 450 MHz),则计算得到a slot time="0".96 ms,μ=0.96×16=15.36 ms;变化范围为正负6×0.96=5.76 ms,符合(9.6,21.12)的均匀分布。由于处理速度大于包的生成速度,设备的GTS请求被立即分配,立即发送所有包。此过程满足高约束实时环境。
3.2 多个设备请求GTS的响应时间的模型
如果有多于7个设备同时请求GTS,它的完整模型如图6所示。
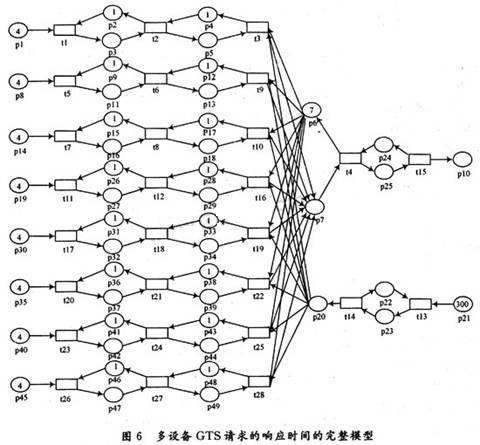
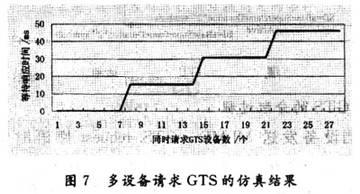
图 6中左边每一行表示1个设备要求申请GTS传送,8行表示8个设备要求GTS传送;右边的2行,下面一行用来控制整帧的时间推进,上面的用来控制帧中时隙的推进。P6和P22的7个令牌,表示帧中最多可以分配7个时隙的GTS(这里表示最多可分配7个设备的申请)。P1,P6等4个令牌表示每个设备有4个数据包产生,并需要发送。在t1,t5,t7,t11,t17,t20,t23,t26处设置时间控制函数,表示数据包产生的时间间隔。仿真中假设传感器周期探测,设常数分布300 ms(大部分温度湿度传感器的探测周期)。在t4处设置时间控制函数,常数分布,表示时隙之间间隔,即时隙宽度,0.96 ms。在t13处设置时间控制函数,表示整个帧的长度,常数分布15.36 ms。仿真表明,响应时间不是很长,最大等待时间为1个超帧的长度15.36 ms,即它能满足实时的低约束环境。如果设备请求GTS的个数增加30倍,需要分配5个超帧时间的长度,而设备最多等待4个超帧时间。因此,一些设备失去了分配GTS的机会。实际上,1个设备可以请求多个GTS,随着GTS请求丢失的越多,响应时间也随着增加,仿真结果如图7所示。
3.3 多设备随机请求GTS
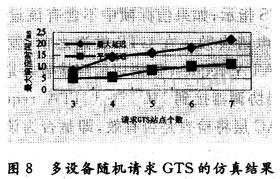
图 6中的模型也适合于事件驱动传感器,GTS请求随机到达。假设包到达服从泊松分布,改变t1,t5,t7,t11,t17,t20,t23,t26处设置时间控制函数,设服从期望值为15.36 ms(1帧的长度)的负指数分布,产生GTS请求的结点从3~7进行仿真。仿真结果如图8所示。由于随机产生的GTS请求,GTS的响应时间比上面定时同时产生请求要短。但也可以看到随着产生站点GTS请求的站点增多,最大响应时间和平均响应时间都在逐步增大。这样随着产生GTS的数量增多,丢失GTS的情况一定还会发生。由于随机产生的GTS请求,GTS的响应时间比上面定时同时产生请求要短。但也可以看到随着产生站点GTS请求的站点增多,最大响应时间和平均相应时间都在逐步增大。这样随着产生GTS的数量增多,丢失GTS的情况一定还会发生。
4 结语
根据对星型传感器网络的分析和仿真,如果每个设备只请求1个GTS时隙,最多允许7个设备同时请求GTS;否则,不满足高约束实时环境。如果请求GTS的设备大于28,GTS将会丢失。如果1个设备请求多个GTS时隙,GTS丢失率会成倍增加。因而,现有的传感器网络协议不足以满足实时系统,协议的改进有待进一步研究。本文的研究成果对于传感器网络应用于实时控制系统具有重要的参考价值。
分析中,假设每个设备申请GTS只占一个时隙(IEEE 802.15.4中允许一个GTS占用连续多个时隙)。假设网络中只有一个设备需要GTS传输,采用PETRI网为传感器网络建立关于延迟模型如图5所示。
图 5中,t1处加入时间控制,用来仿真数据包到达,由传感器周期性采样的性质,选择间隔为常数的分布,参数为λ,表示每秒到达信息包个数。根据采样时间,将传感器分为2种:一种是周期传感器;另一种是事件驱动传感器。采用周期采样,一般探测周期为300 ms,于是,λ=300 ms。
在 t4时间加入常数分布的时间控制,均值为μ,根据文献计算,aBaseSlotDuration=60 symbols,datarate=62.5 ksymbols/s(2 450 MHz),则计算得到a slot time="0".96 ms,μ=0.96×16=15.36 ms;变化范围为正负6×0.96=5.76 ms,符合(9.6,21.12)的均匀分布。由于处理速度大于包的生成速度,设备的GTS请求被立即分配,立即发送所有包。此过程满足高约束实时环境。
3.2 多个设备请求GTS的响应时间的模型
如果有多于7个设备同时请求GTS,它的完整模型如图6所示。
图 6中左边每一行表示1个设备要求申请GTS传送,8行表示8个设备要求GTS传送;右边的2行,下面一行用来控制整帧的时间推进,上面的用来控制帧中时隙的推进。P6和P22的7个令牌,表示帧中最多可以分配7个时隙的GTS(这里表示最多可分配7个设备的申请)。P1,P6等4个令牌表示每个设备有4个数据包产生,并需要发送。在t1,t5,t7,t11,t17,t20,t23,t26处设置时间控制函数,表示数据包产生的时间间隔。仿真中假设传感器周期探测,设常数分布300 ms(大部分温度湿度传感器的探测周期)。在t4处设置时间控制函数,常数分布,表示时隙之间间隔,即时隙宽度,0.96 ms。在t13处设置时间控制函数,表示整个帧的长度,常数分布15.36 ms。仿真表明,响应时间不是很长,最大等待时间为1个超帧的长度15.36 ms,即它能满足实时的低约束环境。如果设备请求GTS的个数增加30倍,需要分配5个超帧时间的长度,而设备最多等待4个超帧时间。因此,一些设备失去了分配GTS的机会。实际上,1个设备可以请求多个GTS,随着GTS请求丢失的越多,响应时间也随着增加,仿真结果如图7所示。
3.3 多设备随机请求GTS
图 6中的模型也适合于事件驱动传感器,GTS请求随机到达。假设包到达服从泊松分布,改变t1,t5,t7,t11,t17,t20,t23,t26处设置时间控制函数,设服从期望值为15.36 ms(1帧的长度)的负指数分布,产生GTS请求的结点从3~7进行仿真。仿真结果如图8所示。由于随机产生的GTS请求,GTS的响应时间比上面定时同时产生请求要短。但也可以看到随着产生站点GTS请求的站点增多,最大响应时间和平均响应时间都在逐步增大。这样随着产生GTS的数量增多,丢失GTS的情况一定还会发生。由于随机产生的GTS请求,GTS的响应时间比上面定时同时产生请求要短。但也可以看到随着产生站点GTS请求的站点增多,最大响应时间和平均相应时间都在逐步增大。这样随着产生GTS的数量增多,丢失GTS的情况一定还会发生。
4 结语
根据对星型传感器网络的分析和仿真,如果每个设备只请求1个GTS时隙,最多允许7个设备同时请求GTS;否则,不满足高约束实时环境。如果请求GTS的设备大于28,GTS将会丢失。如果1个设备请求多个GTS时隙,GTS丢失率会成倍增加。因而,现有的传感器网络协议不足以满足实时系统,协议的改进有待进一步研究。本文的研究成果对于传感器网络应用于实时控制系统具有重要的参考价值。
- 光缆结构及工艺的发展(03-04)
- 基于Zigbee的远程家庭监护系统的应用研究(04-08)
- 触摸屏基本原理(04-16)
- 无线传感器网络的服务质量保障技术(10-16)
- 网络自组织通信模式和技术研究综述(10-26)
- 视频传感器网络覆盖控制(Coverage Control)问题研究概述(11-24)