视频传感器网络覆盖控制(Coverage Control)问题研究概述
传感器网络的覆盖控制问题,可以看作是在传感器网络节点能量、无线网络通信带宽、网络处理能力等资源普遍受限情况下,通过网络传感器节点放置以及路由选择等手段,最终使传感器网络的各种资源得到优化分配,进而使感知、监视、传感、通信等各种服务质量得到改善。如何根据不同的应用监测需要,对传感器网络进行不同级别的覆盖控制就成了传感器网络中一个基本但亟待解决的问题。给定一个传感器网络,覆盖控制也可以一般性地总结为通过各个传感器节点协作而达到对监视区域的不同管理或感知效果。
与覆盖控制问题直接相关的是传感器节点的感知模型,设计合理的感知模型是研究传感器网络覆盖控制的理论基础和必要手段。目前,传感器网络主要有两种基本感知模型:
布尔感知模型(Boolean Sensing Model):节点的感知范围是一个以节点为圆心,半径为其感知距离(由节点硬件特性决定)的圆形区域。只有落在该圆形区域内的点才能被该节点覆盖,目标被感知的概率均取值为"1",参见图1(a)。 概率感知模型(Probabilistic Sensing Model):在节点的圆形感知范围内,目标被感知到的概率并不是个常量,而是由目标到节点间距离、节点物理特性等诸多因素决定的变量。图1(b)中颜色深浅来表示目标被感知的概率的大小;离节点越远,颜色越浅,目标被感知的概率也就越小。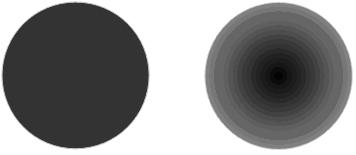
(a)布尔感知模型 (b)概率感知模型
图1 两种全向感知模型示意图
上述模型属于简单理想化的感知模型,不能很好地适用于实际传感器网络环境对感知模型多样化的需要。比如,对温度、湿度等传感器节点而言,它们对环境的感知能力是全方位的;然而,对视频传感器节点而言,它对环境的感知受"视角"的限制,是具有方向性的。可以说,视频传感器节点的方向性感知是区别于其它传感器节点的最显著特征。
针对视频传感器节点的上述特征,研究人员先后设计出更为通用的节点感知模型。根据节点感知能力范围,传感器网络模型又可分为:
全向感知模型(Omni-Directional Sensing Model):节点的感知范围是一个以节点为圆心,半径为其感知距离(由节点硬件特性决定)的圆形区域,参见2(a); 有向感知模型(Directional Sensing Model):节点的感知范围是一个以节点为圆心,半径为其感知距离,且与视角相关的扇形区域,参见2(b)。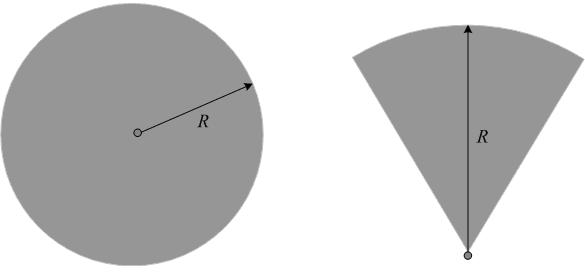
(a) (b)
图2 感知模型示意图
作为传感器网络的一个重要问题,覆盖控制研究引起了国内外研究学者的广泛关注,并针对不同覆盖需求研究出一系列有效方法。覆盖问题的起源可追溯到艺术馆走廊监控问题(Art Gallery Problem)。不同的应用对覆盖有不同的解释和要求。通常可分为区域覆盖、点覆盖和栅栏覆盖三种。
区域覆盖区域覆盖是最为常见的一种覆盖问题,主要用于对某个区域实施监测。通常所说的覆盖即指区域覆盖。理想情况下,即要求目标区域内的每一点至少被一个传感器节点所覆盖;其现实意义在于实现目标区域的最大化覆盖,如图3(a)所示。目前,较为成熟的区域覆盖方法是从优化节点调度,延长网络寿命的角度出发,采用轮换"活跃"和"休眠"节点的节能覆盖方案。而此节能覆盖方案的关键就是要在保证一定网络区域覆盖要求的条件下,最大化轮换节点集合数目。另外,考虑遗漏或薄弱区域的覆盖不充分问题,将移动节点引入传感器网络覆盖控制中,通过对原有的节点部署进行动态调整,实现动态适应实际需求的覆盖过程。
点覆盖点覆盖只需对目标区域内的有限个离散目标进行监测,研究目的在于保证每个目标在任意时刻至少被一个传感器节点所覆盖。如图3(b)所示。当大规模密集型传感器节点随机部署时,上述区域覆盖问题也可用点覆盖近似表示。前提是网络规模大、节点分布密集,可通过覆盖每个传感器位置来近似给定区域内所有点的覆盖。因此,点覆盖研究方法与区域覆盖研究方法相类似,不同点在于:点覆盖只需要邻居节点集合信息;而区域覆盖则还需要几何/方向等方面的数据。
栅栏覆盖在目标监测应用中,人们通常关心某个移动目标沿任意轨迹穿越节点的部署区域时被监测到或没被监测到的概率,这类问题属于"栅栏覆盖",如图3(c)所示。这类覆盖问题的目标是找出连接初始位置和目的位置的一条或多条路径,使得这样的路径在不同模型定义下提供对目标的不同传感/监视质量。目前主要的解决方法是,定义"最大突破路径"(Maximal Breach Path)和"最大支撑路径"(Maximal Support Path),分别使得路径上的点到周围最近传感器的最小距离最大化以及最大距离最小化;进而采用Voronoi图和Delaunay三角测
- 协作处理技术在视频传感器网络中的应用(01-01)