你必须要真正了解的无人驾驶汽车传感器
公司同样也有具备360°探测能力的激光雷达产品。并且,因为同时提供ADAS解决方案,Leddar同样也提供传感器融合技术,把不同传感器的数据组合在一起,从而形成车辆周边环境的整体图像。
固态LiDAR——替代摄像头/雷达或者作为它们的补充,可集成到ADAS以及无人驾驶功能中;
为高级别无人驾驶提供高密度点云的LiDAR;
可以支持光扫描或者光束测量的LiDAR(例如MEMS镜面);
Ledaar的激光雷达探测距离可达250m,水平视角可达到140度,每秒可生成48万像素的点云,水平和垂直方向的分辨率可达0.25度。
导读: 特斯拉在五月份发生的无人驾驶事故,和最近在Defcon上演示的如何干扰传感器,都充分说明了传感器在无人驾驶中的重要性:环境感知是无人驾驶实现的基础,如果不能正确地感知周围环境,那么接下来的认知、决策与控制,都是空中楼台。
视觉图像传感器
现在一个很广泛的应用是将2D激光雷达与视觉传感器相结合,不过相比于激光雷达,视觉传感器低成本的特性,也让其成为了在无人驾驶解决方案中不可或缺的存在。
通过视觉传感器的图像识别技术对周边环境进行感知,对于无人驾驶而言,除了知道在什么位置存在什么物体/行人之外,进而像车辆发出减速刹车等指令来避免事故这一功能之外,是以图像识别为基础,能够理解当前的驾驶场景,并学会处理突发事件。
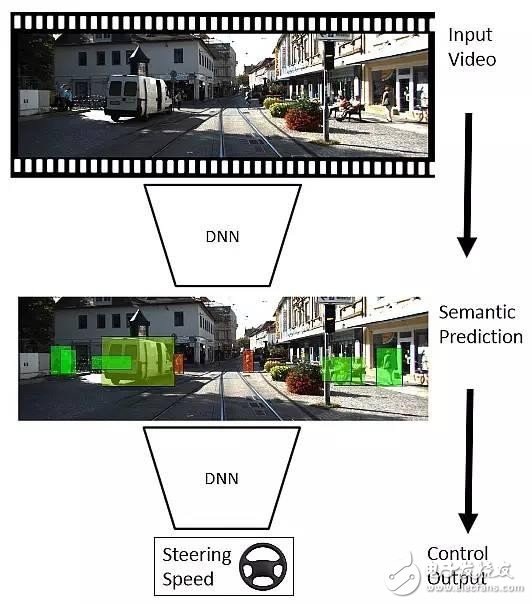
△视觉传感器工作流程
如果说激光雷达的难度在于如何让其性能能够满足无人驾驶导航的需求,那么摄像头的难度则在于从感知拔高到认知的这一过程。
以人眼来进行类比的话,人类驾驶员在看到行人或车辆之后,会基于看到的景象对行人或车辆的下一步行动有个预判,并根据预判来控制车辆。无人驾驶车同样需要这个「预判」的过程,而摄像头就起到观察的作用。无人驾驶汽车必须能够对车内人员、车外行人、车附近人们的行为进行观察、理解、建模、分析和预测。
这个从观察到预测的过程同样适用于道路上的其他车辆,不过,如何获取驾驶场景的整体含义,如何处理突发的场景和目标,如何针对特定目标(行人或车辆)准确进行短时或长时的行为分析,以及如何对周边的人或车辆进行行为预测并决策,这些技术都有待于进一步的深入研究。
车云小结
传感器和算法的研究和相应的工程技术正在快速发展,它们可以使无人驾驶汽车预测人和车辆的不确定行为,并快速响应以避免车辆、财产的损失,更重要的是能够保护珍贵的生命。
当然,无人驾驶的传感器并不只是激光雷达与摄像头两类,毫米波雷达与超声波雷达,以及目前还并没有为无人驾驶所用的声音传感器。
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)