关于快速充电技术的探讨
时间:09-14
来源:互联网
点击:
持恒定。
模糊控制器的基本结构见图10。选择蓄电池端电压的误差e和误差变化率e?作为模糊控制器的输入量,选择移相控制角作为输出变量。系统通过实时采集蓄电池的端电压,计算出误差和误差变化率,经折算后判断其所处的状态,进行模糊推理,再经清晰化,获得控制量U,通过调整移相控制角的大小,即可调整充电电压的大小。整个设计过程包括3个部分:精确模糊化,模糊推理和控制量的清晰化。
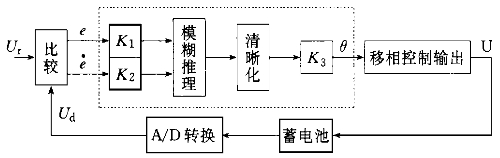
图10 蓄电池模糊控制器的基本结构图
关于精确模糊化,在此作一说明。本系统选定蓄电池端电压Ud的误差e(e=Ur,Ur为给定电压)及误差变化率e 作为模糊控制器的输入变量,移相控制角作为模糊控制器的输出语言变量。由于误差和误差变化率实际变化范围很大,需将它们转换到固定区域内。端电压在充电过程中总处于上升阶段,因此e的变化范围只选正半部分;考虑到误差变化率在接近出气点时数值很大,模糊语言变量可以考虑再增加PVL(正向非常大的变化)。因此e的语言变量选 PS,PM,PL,PVL;e? 的语言变量选NS,ZE,PS,PM,PL,PVL。再根据实际情况,确定输入语言变量的量化因子,输出语言变量的比例因子和隶属函数。
5 结束语
快速充电方法的确定与充电效果有着密切的关系,在设计充电系统时,需要根据充电对象和系统要求确定合适的充电方法,同时根据系统要求选择相应的充电集成电路,或者设计相应的充电电源和充电电路。
快速充电 相关文章:
- 多功能电动汽车的快速充电系统设计方案(02-28)
- 快速充电设计模型(01-10)
- USB电源适配器的电路保护方案(03-23)
- 基于电动汽车快速充电技术研究及发展趋势(09-16)
- 快速充电技术解析及解决方案集锦(09-17)
- ITECH新型测试方案,为快速充电保驾护航(11-22)