基于虚拟仪器的开关磁阻电机监控系统设计方案
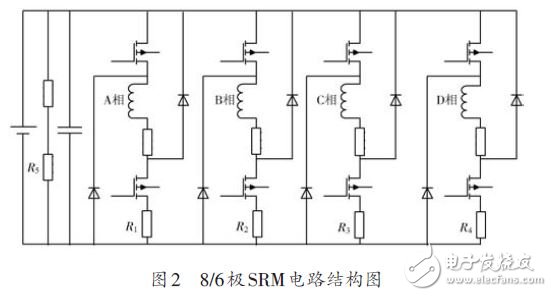
器可以实现更安全的工作方式。目前比较常用的方式是采用通过测量磁链和电流,推导出电机的角度。但这需要事先获取SRM在不同位置下的磁链值和电流值作为后面运行时判断的依据。如果将来本系统需要进行无位置传感器技术改造的可能,那么为了准确得出转子位置,需要在转子轴上固定绝对位置编码器。绝对位置编码器输出的是格雷码,需要处理后获得普通二进制码。当然,在稳态运行时,绝对位置编码器也完全可以取代光电位置传感器以提供更为准确的转速信息。只是相对于光电位置传感器来说,绝对位置编码器价格昂贵,且较易损坏,并不适合于振动较剧烈的场合。实验电机的电路结构如图2所示。其中,R1~R4分别为与电机四相串联的小电阻,R5则为用于测量绕组电压的分压电阻。
1.6 需要注意的事项
(1)由于SRM为8/6极,A、C两相并不同时导通,这两相可以共用一个电流传感器。同样,B、D两相也可共用一个电流传感器。
(2)传感器所获取的信号中必然会掺进一些杂波,如果不进行必要的滤波处理,结果将可能与实际值相差比较大。LabVIEW的Filter模块提供了比较常用的一些滤波方式,可以很方便地去除杂波。
(3)选择电压和电流传感器时,应该注意它们的测量范围。同时,为了保证足够的精度,应该使得电压传感器和电流传感器工作在最佳状态。
2 转矩和磁链值显示
虚拟仪器不仅可以快速执行数据采集的任务,而且可以借助PC机实现很强的数据处理能力。在获取转速、端电压和相电流数据以后,可以利用PC机进行实时计算以得出磁链和转矩值并显示出来。
2.1 磁链计算
磁链值的求取可以依照式(1)进行:
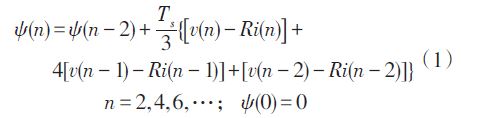
式中:Ts 为每两次采样间隔时间;R 为电机绕组的阻值。
为了尽可能地减少数据运算时间,提高运行速度,也可以用查表方法得出磁链值。即先将不同的电流i与角度θ 下的磁链值ψ(i,θ) 存储下来,这样在运行时可以很快用线性拟合的方法得出不同电流与角度下的磁链值。当然,这样处理的结果是使得误差增大。但误差依在可接受的范围以内 [6]。
2.2 转矩计算
转矩的计算原理如式(2)所示:

式中:J 为系统转动惯量;ω 为电机转速;B 为粘滞磨擦系数;TL 为负载转矩。
3 运行分析
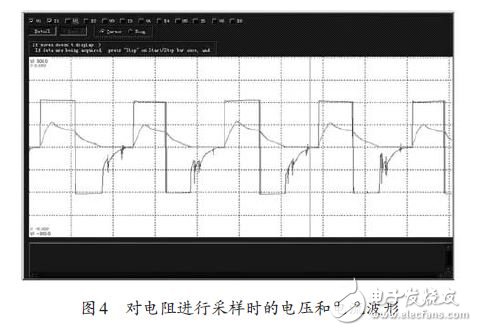
电机轻载稳定运行时的状态监控图如3所示。为了观看方便,图中只给出了单相的监测情况。假定工作中出现的最严重情况是PC机不能正常工作,且霍尔电压传感器和霍尔电流传感器均已损坏。此时备用的DSP 将开始代替PC 机工作。在负载为1.25 NM,转速为1 200 rad,导通角为4°,并断角为20°时,电压和电流波形如图4所示。
图4 中,横坐标为1 ms/格,纵坐标为电压曲线100 V/格,电流曲线3 A/格。对于在强迫换向阶段,图4中电压曲线出现的毛刺,分析原因是此时绕组两端开关虽然均已断开,但绕组磁场能量仍然通过两端的二极管进行释放。由于采用一般的桥式整流电路作为直流电源,其输出电压并不能保证恒定不变,因此在强迫换流阶段,采样电阻端电压不稳定。

4 结语
本方案所设计的监控系统非常直观且精确地表现了电机运行的各项重要参数,相比于传统使用各种设备来观测数据,大大提高了工作效率,也节省了成本。该系统可以根据SRM运行情况,实时修改导通角、关断角和脉冲时间间隔等参数,以控制电机的运行速度和输出转矩等。实验证明,该控制系统的实用性和可靠性比之前大大提高。另外,备用的检测回路和DSP运算系统,也为该系统增加了更高的可靠性。
- 将HIL应用于无人机制导、导航与控制(03-01)
- 开发用于重型履带式汽车的双测功机道路负载仿真器(05-28)
- 电网不平衡现象是如何产生的?(02-22)
- 什么是三相电压?三相电压不稳定该如何解决呢?(03-28)
- 三相电压不平衡怎么办?三相电压不平衡的原因_三相电压不平衡的危害(07-02)
- 三相电压不平衡指的是相电压还是线电压?线电压和相电压的区别与关系解读(07-02)