基于虚拟仪器的开关磁阻电机监控系统设计方案
0 引言
开关磁阻电机(SRM)的结构和工作原理比较简单,容错性能好,且在低速时只需较小电流便可获取较大转矩,高速时恒功率区范围较宽,可以用在煤矿、纺织、化工、电动汽车等工作环境较恶劣的场所。但由于SRM定子、转子的双凸极结构、绕组电流的非正弦特性以及铁心磁通密度的深度饱和,使得SRM的平稳控制比较难以实现,尤其是在降低其运行时的噪声方面。目前常见的SRM 控制系统往往侧重于电机性能的单一方面,不能很好地实现多种参数的综合调节。如果控制系统可以实时反映SRM在运行状态时的各项重要参数,并且进行统筹分析,将使得工作效率大大提高。虚拟仪器的数据处理能力强大,操作界面友好,同时其开发周期短,体积小,受到越来越广泛的关注。
本文中的数据是采用美国NI公司推出的PCI-6143数据采集卡,并以LabVIEW8.6为开发环境编写程序而获取的。考虑到该系统可能在比较恶劣的工作环境下使用,为了更安全有效地实现实时控制,同时利用DSP作为PC机的备用处理器。实验用样机是一台8/6极,功率为150 W的SRM。
1 开关磁阻电机监控系统组成
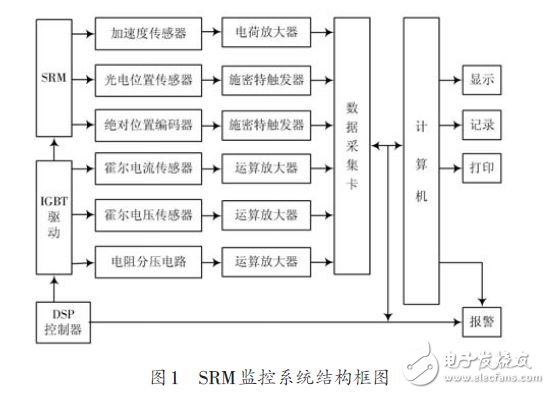
SRM运行监控系统主要由SRM驱动系统及各类传感器、数据采集卡、PC机以及DSP组成。系统结构框图如图1所示。
1.1 相电压信号检测
相电压是反映SRM启动、稳定运行、调速或者制动状态的一个重要参数。利用霍尔电压传感器测量相电压作为主测量回路。霍尔电压传感器的初级线圈并联于电机某一相绕组两端。为了使其工作在最佳状态,应在初级线圈串联适当大小的电阻,最好是可调电阻。霍尔电压传感器的次级线圈则串联一个阻值适当的精密电阻,通过运算放大器处理后接入数据采集卡。
考虑到过电压时霍尔传感器容易烧坏,采用电阻分压电路作为备用电压测量回路。通过测量分压电阻两端的电压,可以用推算出SRM相电压。这种方法简单易行,但精度比较低。需要注意的是,测量电路与主电路之间需要有光电耦合器隔离开来,以免两个回路之间互相影响。
1.2 相电流信号检测
根据电磁感应定律,通电导线周围存在磁场,其大小与导线中的电流成正比,故可以利用霍尔效应测量出磁场,也就可以确定导线中电流的大小。利用霍尔电流传感器可以较准确地测量SRM相电流大小,并且测量电路与主电路之间隔离,没有电接触,是一种安全的测量方式。当出现过流时,霍尔电流传感器也较容易损坏。故而在每一相绕组中串联一个阻值比较小,但精度和功率较大的电阻。通过测量该电阻端电压,可以测知绕组电流。当然,其精度也是比较低的,但也可以作为电流测量的备用回路。
SRM的相电流波形根据运行方式和运行条件的不同而有比较大的变化,并且会出现脉动现象。为了尽可能真实地反映电流的变化情况,需要把数据采集卡的采样频率设置得比较大,最好在10 kHz以上。另外,检测电路也应该具有快速性能好、检测频带范围宽,并且主电路与控制电路有良好隔离的特点。电流检测电路主要实现电流的观测及过流保护两种功能。
1.3 振动信号检测
开关磁阻电机是双凸极结构,在运行时的噪声比较大。消减噪声需要避免电机工作在其振动比较剧烈时的频率。这除了改变底座大小等方法,还可以通过改变电机运行速度来实现。另外,SRM虽然有着很强的容错性能,在缺相时仍可运行,但此时的噪声是比较大的。长时间缺相运行对于SRM来说损伤较大。所以,振动信号也是电机故障诊断中最常用的特征信号。本系统中,获取振动信息装置的核心部分是压电晶体加速度传感器,将其牢牢固定在SRM机壳的中间位置。电机运行时,它将产生与振动相对应的电荷,再由电荷放大器转换为电压信号后输入数据采集卡,然后进行频谱分析,以确定电机的振动频率。最后,根据历史数据,确定目前是否需要改变运行速度。
1.4 转速信号检测
采用光敏式转子位置传感器测量转速,包括光电脉冲发生器与铝制转盘。转盘的齿、槽数目分别与转子的凸极和凹槽数目相等并且均匀分布。本系统的实验对象为8/6极四相SRM,则转盘的齿、槽数目都为6,依次间隔30°。两个光电脉冲发生器之间夹角为 75°,分别固定在定子极中心线左右两侧37.5°处。转盘同心固定在转子轴上,与转子轴旋转同步。当电机运转时,两个光电传感器的工作状态依次为:00-01-11-10-00,并不断循环。该信号是TTL电平信号,接入数据采集卡的计数器端口,然后利用LabVIEW测量频率模块获取信号频率,进而算出转速。
1.5 位置信号检测
在非常恶劣的条件下工作时,转子位置传感器可能失效。在这种情况下,无位置传感
- 将HIL应用于无人机制导、导航与控制(03-01)
- 开发用于重型履带式汽车的双测功机道路负载仿真器(05-28)
- 电网不平衡现象是如何产生的?(02-22)
- 什么是三相电压?三相电压不稳定该如何解决呢?(03-28)
- 三相电压不平衡怎么办?三相电压不平衡的原因_三相电压不平衡的危害(07-02)
- 三相电压不平衡指的是相电压还是线电压?线电压和相电压的区别与关系解读(07-02)