基于LDC1000的金属物体探测定位系统
此采用方案二作为自主移动的方案。
3理论分析
LDC1000检测的原理
LDC1000电感的检测原理是利用电磁感应原理。在线圈中加一个交变电流,线圈周围会产生交变磁场,这时如果有金属物体(如图3-1)进入这个磁场则会在金属物体表面产生涡流。涡流电流与线圈电流的方向相反。涡流产生的感应电磁场与线圈的电磁场方向相反。涡流与金属体磁导率、电导率、线圈的几何形状、几何尺寸以及头部线圈到金属导体表面的距离等参数有关。
涡流产生的反方向磁场跟线圈耦合在一起,就像是有另一个次级线圈存在一样。这样LDC1000的线圈作为次级线圈就形成了一个变压器。如图3-2所示由于变压器的互感作用,在初级线圈这一侧就可以检测到次级线圈的参数。

设Ls为初级线圈的电感值,Rs为初级线圈的寄生电阻。L(d)为互感,R(d)是互感电阻的寄生电阻,其中d为距离的函数。
交流电若只加在电感上(初级线圈),则在产生交变磁场的同时也会消耗大量的能量。这时将一个电容并联在电感上,由于LC的并联谐振作用能量损耗大大减小,只会损耗在Rs和R(d)上。由此可知检测到R(d)的损耗就可以间接的检测到d。
由上可知LCD1000并不是直接检测串联电阻,而是检测等效并联电阻。
4电路与程序设计
4.1电路设计
4.1.1 LDC1000与MCU的连接原理
LDC1000与MCU的连接原理图如图4-1所示。采用了四线制SPI连接方式,MCU通过SDI连接(SDI、SDO、SLCK、CSB)实现对LDC1000的控制,以及数据读取。在SPI通信中,LDC1000扮演从机的角色。

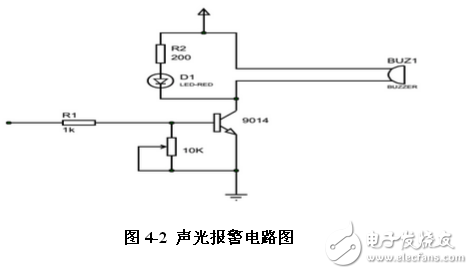
4-1-2声光报警电路
声光报警电路图由开关电路、蜂鸣器和双色二极管组成。操作十分简单,主要由MSP430单片机控制。声光报警电路图如图4-2所示。
4.2程序设计
系统主流程图如图4-3所示。程序运行后,先进行系统初始化,I/O口初始化。后进入探测区,读取Rp值。检测数据是否异常,若数据异常,判断是否为边界值,重新读取Rp值;若数据正常,则检测是否有金属,若没有金属,则进行边界处理,重新读取Rp值,若有金属,进行声光报警并结束。

5系统调试及结果分析
5.1测试方法
(1)静态调试:静态调试是用户系统未工作前的硬件检查过程。首先要对表面进行检查,即对焊接后的电路板的所有连线仔细检查,通过目测查出一些明显的安装及连接错误并及时排除。
(2)万用表测量:测量可能短路或断路的电路,尤其要测量电源与地之间是否短路。
(3)加电检查:开启电源后,检查芯片的电源电压是否正确,也可以用手触摸是否有明显的发烫,所遇芯片均未发现异常,可进入下一步调试。
5.2数据测试及功能分析
5.2.1 Rp数据测量如表1所示。


如表所示,按照遍历整个区域的搜索方法定位的成功率很高。但是实测所得搜索所耗费的时间变化很大,这与区域扫描方法有直接关系,需要进一步的改进。
6总 结
本文设计了一种基于LDC1000的金属物体探测定位系统。以MSP430单片机作为控制核心,通过自主移动的小车携带LDC1000电感数字转换器,使LDC1000在闭合区域内全覆盖式扫描并搜索金属物体。利用单片机自身的定时中断、外部中断、计数功能控制小车的运动轨迹;实现了在50cm×50cm闭合区域内准确定位金属物体的功能。
此次设计的金属物体探测系统实现简单,功能稳定,使用方便,应用广泛,具有实际意义。由于时间较短,且知识有限,本次设计虽已完成,但仍有许多不足。比如不能语音播报所检测的金属物体的类型,检测范围较小等在设计中,还存在有传感器偶尔不能识别铁环、小车承载传感器对闭合区域扫描一周所用时间较长时间较长等缺点。希望以后可以通过学习和知识的积累来改良金属物体探测定位系统的性能。

LDC1000传感器 LDC1000 MSP430F149 相关文章:
- 基于LDC1000和Kinetis微控制器的金属探测系统设计(07-04)
- 如何用MSP430F5529驱动AY-LDC1000(07-08)
- LDC1000的底层驱动程序(07-08)
- 基于MSP430单片机的便携式气象仪设计(06-13)
- LT3751如何使高压电容器充电变得简单(08-12)