基于LDC1000的金属物体探测定位系统
本文设计了一种基于LDC1000的金属物体探测定位系统。以MSP430单片机作为控制核心,通过自主移动的小车携带LDC1000电感数字转换器,使LDC1000在闭合区域内全覆盖式扫描并搜索金属物体。LDC1000传感器携带的线圈在探测物体产生涡流后,等效电阻Rp可以反映位置的情况,因而可以判定出金属物体位置,并由蜂鸣器、开关电路以及彩色二极管组成的声光报警电路发出警报同时使小车停止运动。所设计的金属物体探测器搜索时间较短,定位准确。
1引 言
全球第一台金属探测器诞生于1960年。50多年过去了,金属探测器经历了几代探测技术的变革,从最初的信号模拟技术到连续波技术再到今天所使用的数字脉冲技术,金属探测器简单的磁场切割原理被引入多种科学技术成果。无论是灵敏度、分辨率、探测精确度还是工作性能上都有了质的飞跃。应用领域也随着产品质量的提高延伸到了多个行业。
传统的金属探测器是利用模拟电路进行检测和控制的,其电路复杂,探测灵敏度低,且整个系统易受外界环境如温度、湿度、电焊等诸因素的干扰,工作期间需要频繁的复位和调校。
本文介绍的基于单片机控制的智能型金属探测定位器,采用TI公司新研发的LDC1000作为传感器,提高检测精度;处理部件则采用MSP430单片机作为检测和控制核心,并利用其内部的定时器和模数转换器实现探测波形幅值的采样量化,通过数字信号处理提高系统的灵敏度和抗干扰能力;硬件则由小车和LDC1000套件组成,可自主探测指定区域内的金属体并发出声光提示,较传统金属探测仪更加智能化,应用前景更加广泛。
2方案设计及论证
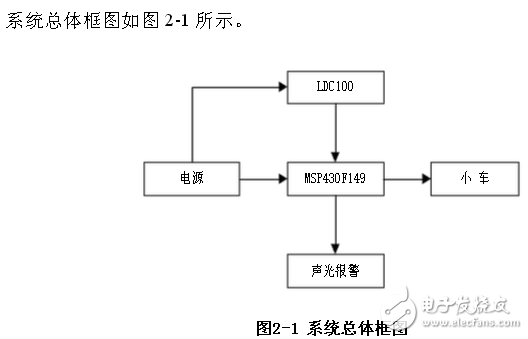
2.1总体方案概述
本系统以MSP430单片机作为控制核心,由LDC传感模块、声光报警模块、小车以及电源通过自主移动小车控制LDC1000数字电感转换器的前进、后退和转向使LDC1000在金属框内扇形移动并搜索金属物体。定位金属物体后,由声光报警电路发出警报同时小车停止运动。其中LDC1000数字电感转换器是利用外接线圈与金属物体表面的涡流所产生的感应电磁场与线圈的电磁场相抵消的能量损耗量来间接地计算金属物体与线圈之间的位置关系。
2.2控制方案的选择与论证
方案一:采用XC9000系列的FPGA。 该种处理器具有并行处理能力,能快速的响应外部的各种数字信号,但在数字的乘除运算等处理方面不方便,且芯片昂贵。
方案二:采用MSP430单片机作为控制核心。 其数字运算功能较强,功耗较低,在程序相互调用方面,处理方便灵活,适合实际应用。且单片机技术发展较为成熟,价格合适。
方案比较:综合以上方案,结合金属物体探测定位系统的要求,方案二不仅在程序处理方面方便灵活适合实际应用,而且功耗较低,精度也完全满足应用要求,所以决定选择方案二的MSP430单片机作为控制核心。
2.3探测器的选择与论证
方案一:采用TI公司生产的电感/数字转换评估板。 LDC1000电感数字转换器提供低功耗、小封装、低成本的解决方案。它的SPI接口可以很方便的连接MCU。此外,LDC1000可以测量外部金属物体和与LDC1000相连的测试线圈的空间位置关系。利用LDC1000的此特性配以外部设计的金属物体。可以很方便的实现水平或者垂直距离检测、角度检测、位移检测和金属成分检测(合金检测)。
方案二:M12金属探测器。 M12金属探测器由两部分组成,即检测线圈装置与自动剔除装置,其中检测线圈为核心部分。线圈通电后会产生磁场,有金属进入会引起磁场变化,由此判断是否有金属物体。
方案比较:经过比较可以看出方案一中的LDC1000是集水平垂直距离检测,角度检测以及金属成分检测等功能于一体的电感数字转换评估器,可以进行角度矫正并检测出测试线圈与金属物体的空间位置关系;而方案二中的M12金属探测器虽然可以检测金属物体但其不能确定金属物体的位置且不具有角度检测的功能。因此我们选择方案一。
2.4自主移动方案的选择与论证
方案一:电脑鼠。 电脑鼠是由嵌入式微控制器、传感器和机电运动部件构成的装置。它具有稳定且快速的行走能力;正确的判断能力以及记忆路径的能力。电脑鼠功能强大但价格昂贵。
方案二:小车。 使用舵机控制小车可以完成自由的前进、后退和转向等动作,实现起来简单。小车可以承载LDC1000传感器在金属框内进行扇形搜索并探测定位。
方案比较:经过比较和分析可以看出,方案一中的电脑鼠功能强大,但其价格昂贵且自带传感器不符合题目要求;而方案二中小车承载LDC1000传感器在金属框内扇形搜索并定位金属物体的位置。此种方案方便可行且符合题目要求,因
LDC1000传感器 LDC1000 MSP430F149 相关文章:
- 基于LDC1000和Kinetis微控制器的金属探测系统设计(07-04)
- 如何用MSP430F5529驱动AY-LDC1000(07-08)
- LDC1000的底层驱动程序(07-08)
- 基于MSP430单片机的便携式气象仪设计(06-13)
- LT3751如何使高压电容器充电变得简单(08-12)