无须单片机!模拟电路控制的循线机器人(图文)
器J2 右轮 左轮 小车
1 断 黑 黑 吸和 吸和 转 转 前进
2 断 黑线 白 释放 吸和 停 转 顺时针
3 断 白 黑线 吸和 释放 转 停 逆时针
4 断 白 白 释放 释放 停 停 停
5 通 任意 任意 释放 释放 停 停 停
下图是光电开关的安装示意。两只红外线光电开关焊接在一片裁剪成条形的洞洞板上,要求模块间距略小于路面黑线的宽度。也就是当小车直线行驶的时候,两只模块同时位于黑线上方。
用两根曲别针弯一对L型的支架,把传感器板固定在小车前部。铁质曲别针很好定型,使得微调光电开关与路面间距变得很简单。线路图里面的电阻数值是配合ITR20001-T型红外线光电开关,经过实际试验决定的。当传感器距离路面5MM的情况下,可以准确动作。如果爱好者使用其他型号的光电开关,电阻数值需要做适当调整。
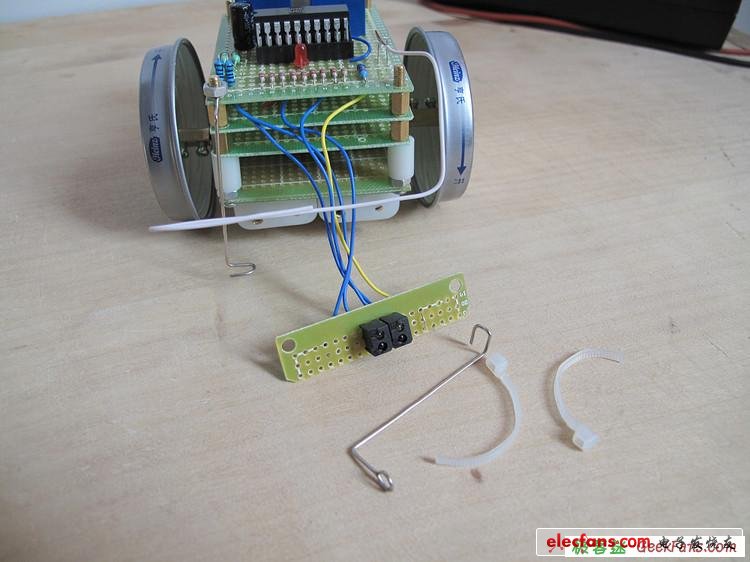
下图所示为避障开关的做法。简单到只需要一根电阻腿,一段网线。
用电阻腿弯一个圆圈焊在洞洞板上,做为开关的定片;网线剥皮穿过圆圈焊在洞洞板上,与圆圈保持微小的间距,做为开关的动片。在网线碰到物体的时候,定片和动片接触,触发电路动作。
因为74HC系列的芯片为CMOS器件,输入阻抗很高,这里可以忽略开关的接触电阻,即使有几百欧姆的接触电阻也不会影响电路的正常动作,实际上这个简陋的土制开关动作非常灵敏。
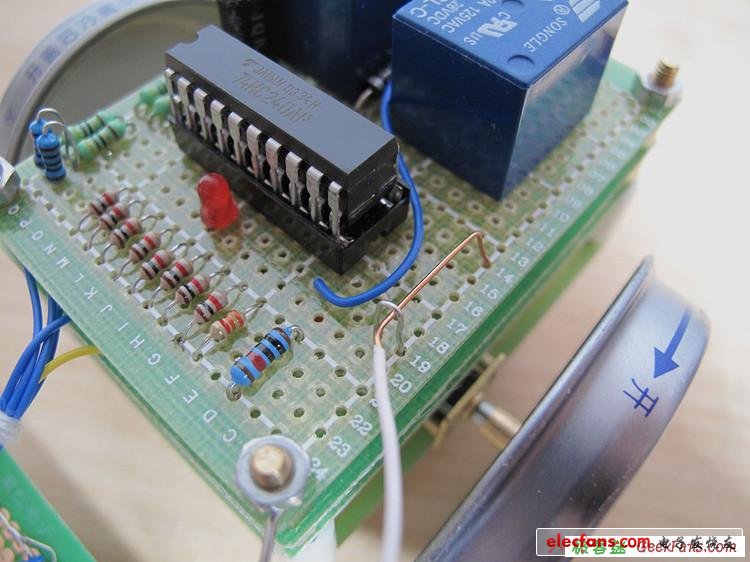
因为电路比较简单,控制板的焊接过程不再做过多说明。5X7厘米的洞洞板空间很大,我把光电开关的电阻用串并联的方式焊在的电路板上,这样有两个好处:一是可以很方便的通过短路个别电阻来调整传感器灵敏度,二是分散的电阻布局使得线路板看上去不会显得太空,外观上比较美观。
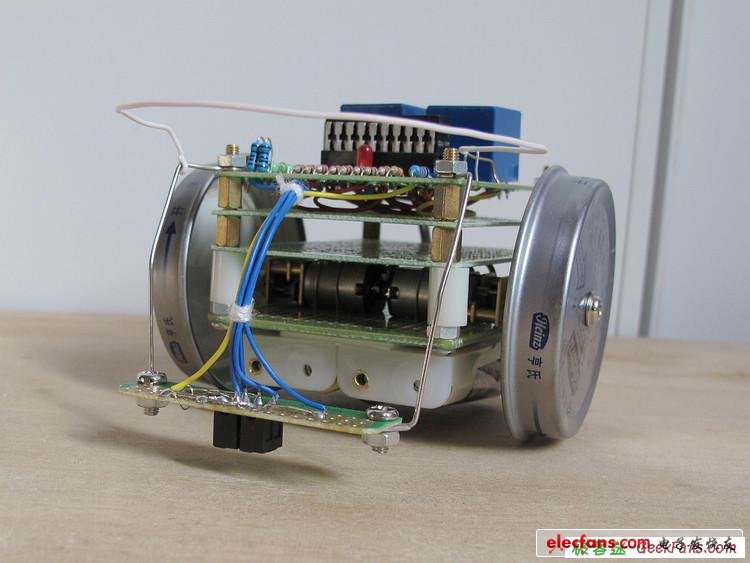
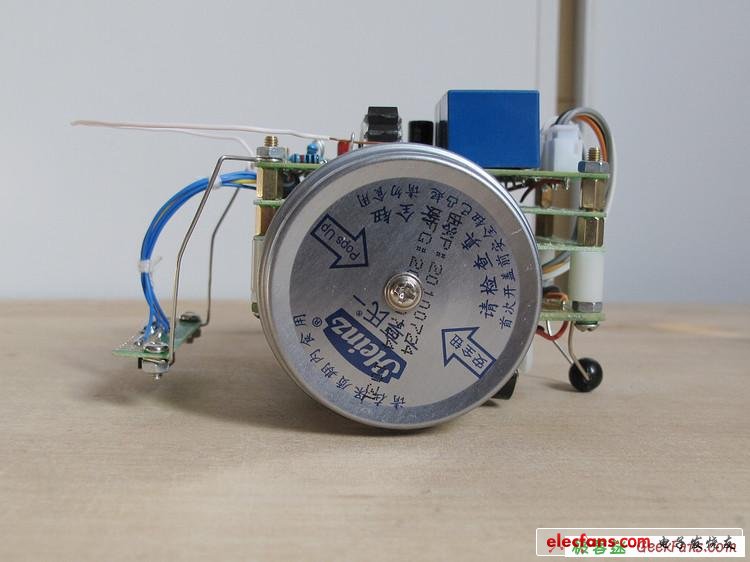
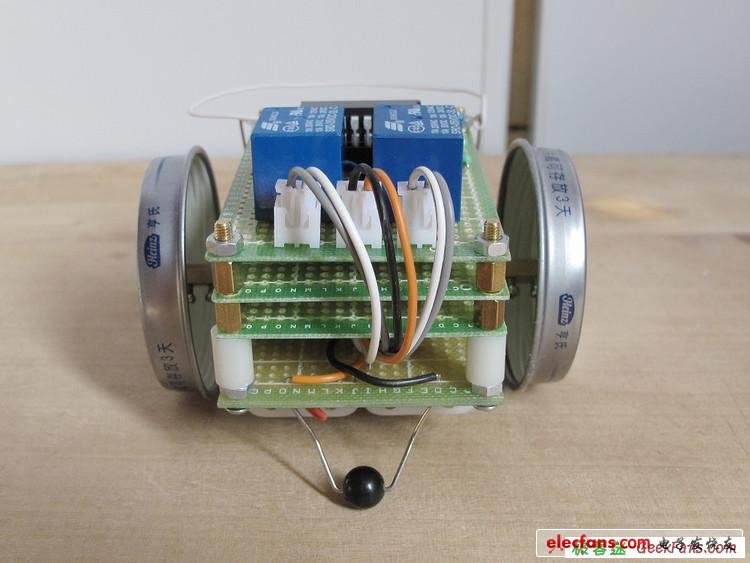
下面几张图是制成的小车。
后话:
从自动控制系统的角度来分析,本文所制作的循线小车(包括其他文章介绍的单片机循线小车)是一个随动系统,随动系统的输入信号是一个随时间变化的函数,系统的任务是在存在扰动的情况下,保证输出量以一定的精度跟随输入信号的变化。
随动系统在工业、交通和国防等部门都有着广泛的应用,比如机床的自动控制,车辆的智能转向,火炮的控制和卫星导航等。机器人爱好者制作的循线小车可以说是一台小中见大的模型,分析和改善它的不足,对深入了解大型的系统亦会有很大帮助。
比如,这台循线小车使用继电器来控制电机转动,电磁式继电器具有吸合电压高于释放电压的特性,相当于在控制系统中加入了积分环节。微型电机的减速箱,存在齿轮传动间隙。这些因素都会增大系统的稳态误差,直观的结果是小车遇到弧度比较小的黑线轨道时转弯效果不好,会出现车体来不及响应运算指令,传感器同时脱离黑线的情况。而在从弧线进入直线的时候,因为齿轮间隙造成光电开关的位移误差,使左右两边的继电器频繁动作。
以下有几个改进的办法供大家探讨:
1,使用快速响应的电机驱动电路,比如在单片机小车里面经常采用的L293D($1.7100),L298N($2.1300)等电机驱动芯片。
2,增加光电开关的数量,这个方法在单片机循线小车里也广泛采用,原理是相通的。
3,在光电开关与比例器之间加入由阻容器件构成的串联超前校正网络和相应的补偿放大器。比例加微分控制(PD)就是一种超前校正,可以提高小车运行的稳定性和快速性。
还可以对光电开关和避障开关进行改进。如使用经过调制的信号来驱动光电开关的红外线发射管,接收管输出信号经过滤波器再进入模拟计算机,以避免外界杂散光线的干扰。避障开关也可以使用红外线或者超声波模块改成非接触式的。
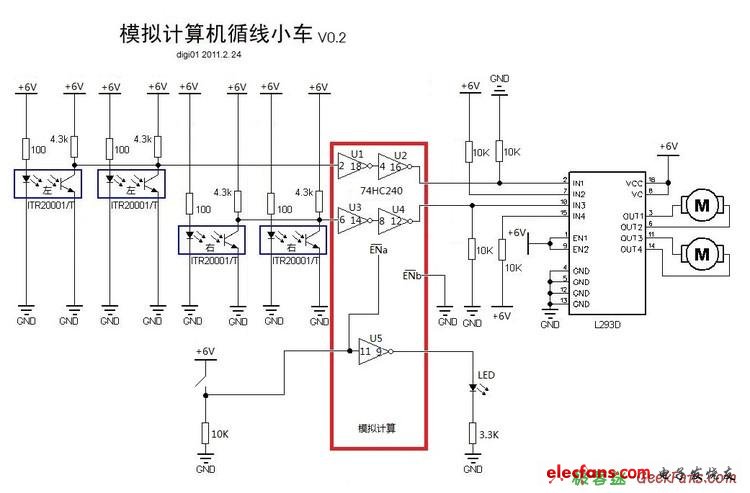
下图是改进版的线路图,扩展了光电模块,使用了L293D驱动芯片。注意这个线路还没有经过测试,仅供参考。
随着科技的发展,数字计算机在各个行业被大量应用;相比之下,与模拟计算机有关的应用资料变得越来越少。本文把这种"古董"的技术发掘出来,加以实际应用,意在抛砖引玉,给大家扩展一下思路,从多个角度去思考问题。
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)