无须单片机!模拟电路控制的循线机器人(图文)
循线小车的制作可以说是机器人爱好者的一门必修课。但是我们常看到的文章大都基于单片机架构,要完整制作出一台这样的小车,需要掌握单片机、程序语言、开发环境、算法、编译环境、烧录软件、下载器等一系列软硬件知识。这对于没有系统学习过单片机的爱好者来说有一定难度。
本文介绍一部由模拟计算机控制的循线小车,它由传感器和线性比例器构成,原理简单易懂,无需编程。只要具备模拟电路知识就可以上手制作。
下面开始,我们的口号是DO IT ALL THE WAY!
一,制作小车底盘。
材料清单:
名称 数量
瓶盖 2只
微型减速电机 2只
工业端子排 1条
通孔珠子 1个
曲别针 1个
M3螺丝螺母 若干
洞洞板 若干
M3套管 4个
M3铜柱 若干
4AAA电池仓 1个
双面胶带 适量
从工业端子排里面拆出两套铜芯,作为轴连器,用来连接车轮和电机。我是用的是380V10A的端子排,铜芯内径是3MM,连接3MM的螺丝和电机输出轴非常合适。这种端子排在一般的五金灯具市场都可以买到,有的吸顶式节能灯的镇流器里面也有这样的铜芯。如下图A。

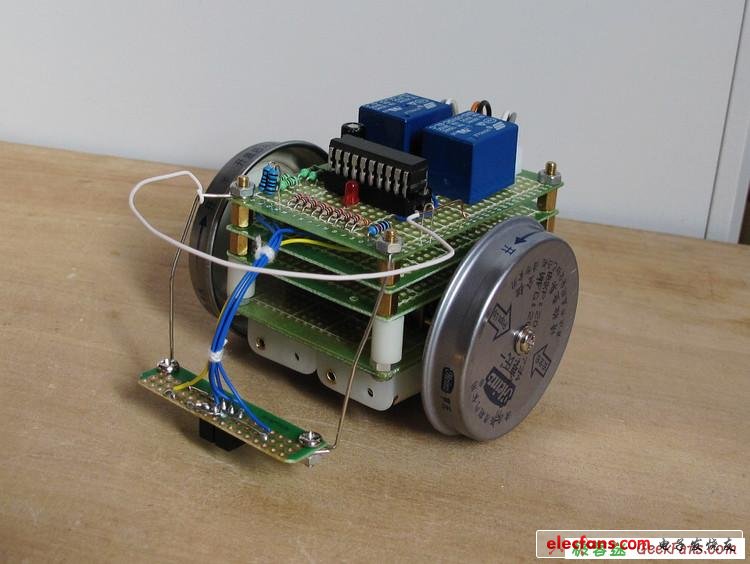
下图是准备好的材料,很简单吧?除了电机,其他材料都是生活中常见的。瓶盖用来做车轮,要选择直径比电机大一些,这样小车下面的电池仓距离地面有一定高度,不会蹭底盘。盖子边缘厚一些,可以增加摩擦力,小车走起来不会打滑。我用的是婴儿食品的金属盖子,铁灰色,比较耐看。如下图B。

在瓶盖的中心打一个3MM的孔,借助一颗3MM的螺丝和轴连器,连接好电机和车轮。用曲别针穿上珠子,弯成下图C形状,做小车的尾轮。

把减速电机稍微靠前,固定在一片洞洞板上。这里电机是用铁丝缠绕并焊接固定的,简单点也可以用热熔胶固定,或者用薄铁皮做一对箍子,配合螺丝固定好电机。如下图D。
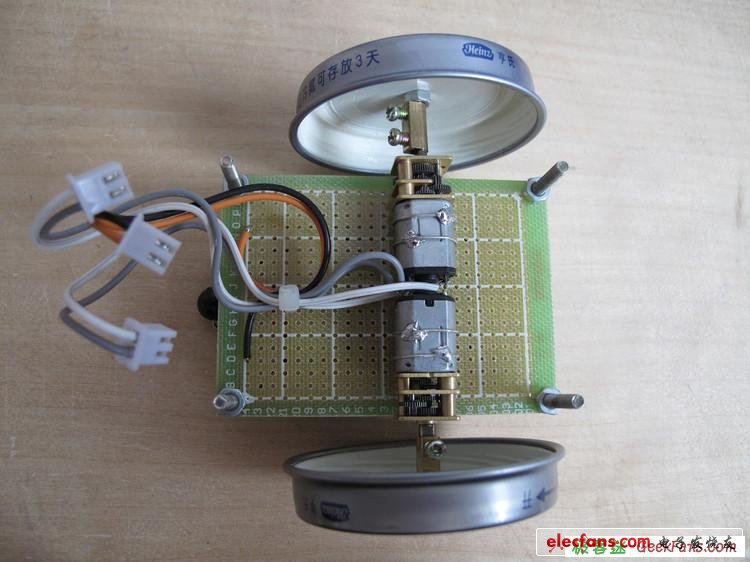
尾轮靠后用螺丝固定在电路板下方。电池仓直接用双面胶贴在洞洞板下面。如下图E。

我是用的是5X7厘米的预制洞洞板,四角有安装孔,借助铜螺丝可以很方便的一片片叠加起来。把电机和电源都单独引出接头,方便将来和上面控制板的连接。如下图F。
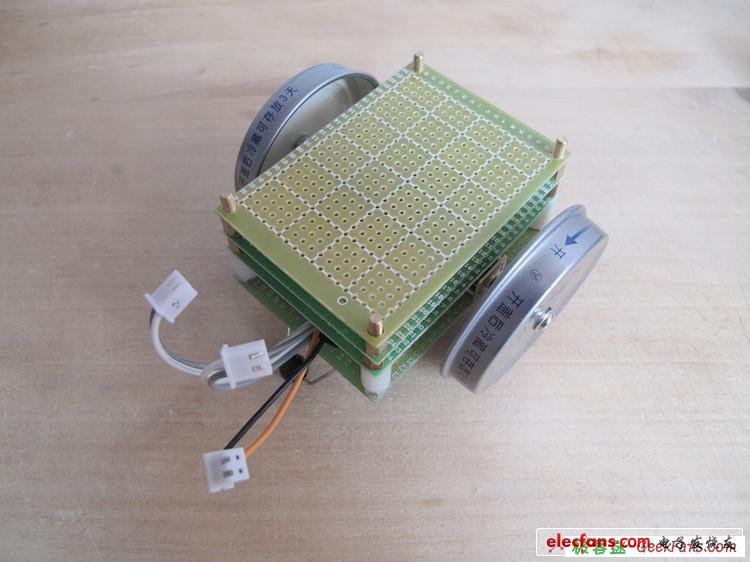
这样,一个基础小车的底盘就做好了。5X7厘米的洞洞板上有足够数量的焊盘,将来还可以用它做单片机小车,换不同的控制板,实现不同的用途。很方便吧?
二,制作循线控制板
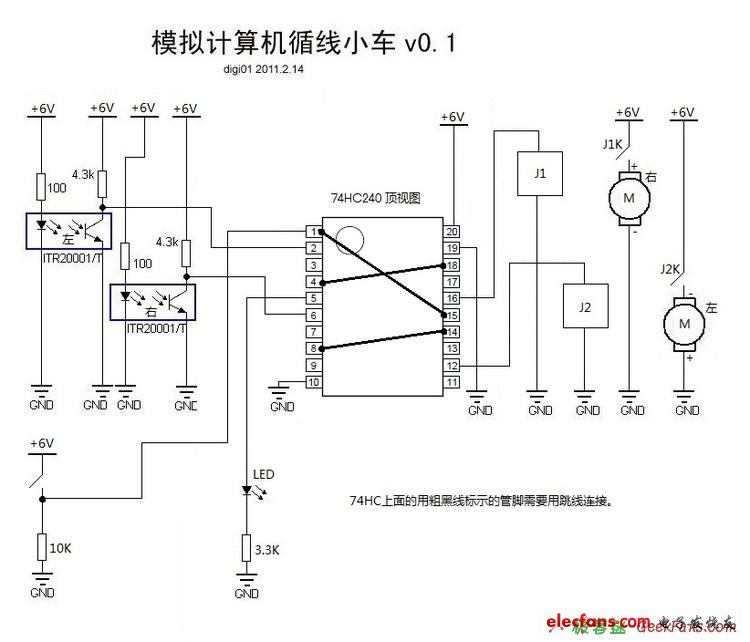
这台循线小车是由模拟计算机控制的。模拟计算机是用电流、电压等连续变化的物理量直接进行运算的计算机,由运算放大器构成核心器件,运算过程不存在模数-数模转换和编程算法的问题。
线路图:

芯片接线图:
元件清单:
型号 数量
ITR20001-T红外线光电开关 2
74HC240($0.1148)配插座 1
5V小型继电器 2
4.3K电阻 2
10K电阻 1
100欧姆电阻 2
网线芯 若干
洞洞板 若干
LED 1
细导线 若干
小车每侧的车轮由两只反相器组成的比例器控制,通过继电器带动减速电机运转。这里使用的是一片八路反相驱动芯片74HC240作为模拟计算机的核心。读者也可以使用通用运算放大器接成反相器来替代,控制效果是一样的。
以下是小车运行状态的分析:
1, 当比例器输入端的红外线光电开关检测到黑线的时候,红外线接收管接收到的反射光减小,接收管呈高阻状态,比例器输入和输出都是高电平,驱动继电器吸合,与之相应的减速电机带动车轮转动。
2, 当左右两只光电开关都检测到黑线,两只继电器同时吸合,小车全速直行。当黑线终止的时候,两个光电开关发射管发出的光线经地面反射至接收管,接收管接收到的入射光增加,比例器输入电平降低,输出电平跟着降低,两只继电器释放,小车停驶。
3, 由此不难分析出小车拐弯时的状态:以小车为第一视角,行驶中遇到顺时针弯道,左侧光电开关首先脱离黑线,继电器J1释放,右轮停转;左轮带动小车做顺时针转动,直至左侧光电开关回复到黑线上方。
4, 逆时针弯道的转向状态与上面相反。
5, 避障控制是利用74HC240的使能端来实现的。当小车前方没有障碍物的时候,74HC240的1脚,11脚因为10K下拉电阻的作用,保持在低电平,对应的四只反相器U1,U2,U3,U4为使能状态。9脚为高电平,LED灯亮,小车按设计运转。当遇到障碍物的时候,1脚和11脚为高电平,四组反相器为关断状态,LED灯灭,小车静默。避障开关的优先级高于光电开关,无论小车在那种运行状态,只要避障开关动作,都会强制小车进入静默状态。
总结起来如下表所示:
状态 避障开关 右光电开关 左光电开关 继电器J1 继电
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)