基于车载视觉的行人检测与跟踪方法
件,可估计每一帧图像状态向量X^k(-) 和相应的协方差矩阵Pk( + )。协方差矩阵Pk( + ) 表示预测下一帧检测行人矩形窗口位置的不确定范围,Pk( + ) 越大,估计值越不稳定,搜索区域也就越大,此时,自动调整搜索区域[17]。
3 试验及分析
行人检测与跟踪识别流程如下:
(1) 按照图3 所示的在线检测模块分析CCD采集的序列图像中是否存在行人,并记录行人目标矩形的相关信息;
(2) 如果在序列图像中连续2 帧检测到行人,则启动行人跟踪程序,并用检测结果更新Kalman滤波器,使其能预测下一帧中行人可能存在的区域;
(3) 对预测区域按照以下策略进行修正:以行人质心位置的估计值作为中心,将预测得出的行人矩形的高度和宽度各放大1. 5 倍,建立行人搜索的感兴趣区域,在新的感兴趣区域中用级联分类器进行目标检测,然后将检测到的行人质心和矩形宽度与高度作为下一步预测的初始值;
(4) 跟踪失效的处理: 在跟踪过程中,如果检测失效,则保持前一帧的行人信息,并在后续帧中继续检测,以防止由于偶然的漏检造成跟踪失效。
如检测失败超过一定的帧数( 本文设定为3 帧) ,则认为行人目标已消失,不再继续跟踪。
为验证本文方法的有效性,在校内柏油道路上进行了白天正常光照条件下的试验验证,试验平台为所开发的无人驾驶试验平台DLUTIV-I,如图3所示。 CCD 选用美国AVT 公司生产的F-033 黑白数字相机,图像分辨率为320 × 240 像素,镜头视场角为25°,焦距为12 mm,采用酷睿2 双核2. 2 GHz、2 GB 内存的工控机。 试验结果表明,本文算法能实现10 ~ 30 m 范围内的行人检测,识别算法每帧约为80 ms,正确检测率能达88% 左右; 利用Kalman 跟踪预测后,由于建立了行人检测的感兴趣区域,有效减少了在图像中扫描行人的时间,算法平均耗时约为55 ms /帧,实时性较好。 表2 统计了车辆在静止和运动两种状态下行人检测与跟踪结果,在车辆运动的情况下,由于背景和行人在图像中位置变化较大,造成误警率较高。
表2 行人检测与跟踪试验结果统计

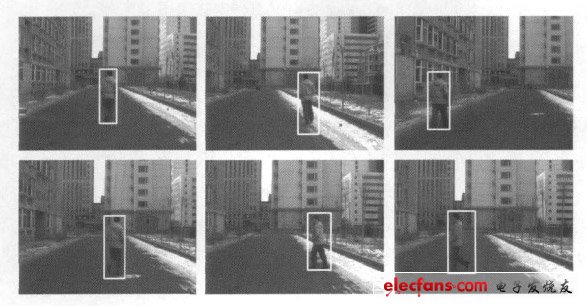
图4 是车辆由静止到运动状态下对前方1 个行人的跟踪结果
行人在车辆静止时背对着车辆向前方行走,行走到一定位置之后等候车辆起动,待车辆向前行驶一段距离后,行人继续向前运动,并伴有横穿道路等动作。 从图5 的跟踪曲线可以看出,识别行人的外接矩形宽度变化比较显着,这符合实际情况,由于行人行走时腿部跨度造成封闭矩形宽度变化明显; 由于行人相对于本车的距离变化是连续的,使得行人外接矩形的高度变化比较连续。

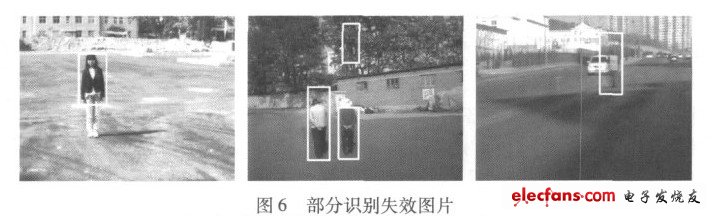
试验表明,光照条件不同会对行人的识别与跟踪结果产生一定影响,尤其当光照较强时,行人某些部位与地面或背景融为一体,灰度差值很小,造成行人定位不精确或者识别失效,如图6 所示。
4 结束语
本文提出一种基于Adaboost 算法的行人检测方法,根据行人运动速度慢的特点,提出利用Kalman 滤波对行人外接矩形的中心及其宽度和高度进行预测,建立动态可变的行人搜索感兴趣区域,使每帧图像处理的平均耗时由80 ms 左右降至55 ms,从而满足实时性要求。 试验表明,本文方法能够识别车辆前方静止和运动的行人,检测率达到约88%。
行人检测技术是汽车安全辅助驾驶研究领域的重要组成部分,下一步需要在行人检测的基础上,分析其运动状态以及本车对其构成的危险程度。 在车辆与行人可能发生碰撞时,及时向驾驶员发出警示信息,当驾驶员没有采取有效避碰措施时,系统启动减速或紧急制动等操作,有效保障行人的安全。
试验表明,本文研究工作还存在一定的不足,考虑因素还不全面,受光照条件的影响较。 下一步拟采取CCD 光圈自动调节装置来改善白天强光照条件或者暗光照条件的成像质量,并研究如何提取有效表征和区分行人目标的特征、增加训练样本或者改进训练方法。 同时,结合红外传感器研究傍晚或夜间等条件下的行人检测。
- 电流检测测量在汽车系统中的应用(08-23)
- 分析测量放大器的共模抑制能力(09-15)
- 基于计算机的测量仪器的内部和外部校准(10-08)
- 善用微处理器简化电源供应器设计(10-25)
- 电池内阻及其测量的方法(12-12)
- 直流工作电压测量法(07-10)