基于车载视觉的行人检测与跟踪方法
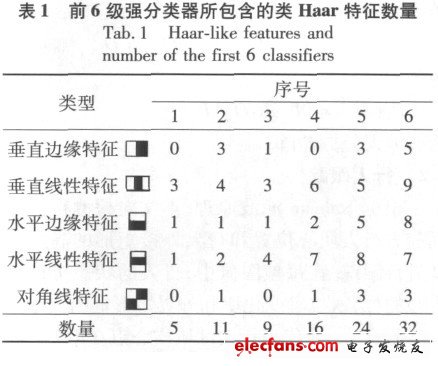
分类器组成,每个强分类器包含了不同个数的弱分类器,每个弱分类器由一个类Haar 特征、阈值和指示不等号方向组成。 随着分类器级数的增大,强分类器中所包含弱分类器即类Haar 特征数量也越多。 训练得到的前6 级强分类器中所包含的类Haar 特征及其数量见表1 所示。
行人在线检测模块是根据训练得到的分类器对待检图像的各子窗口进行判别,检测结果是一系列的目标矩形,显示行人在图像中的位置,本文通过缩放检测子窗口来遍历待检图像,以分割图像中大小未知的行人目标,具体检测过程如下。
(1) 获取大小为320 × 240 像素的待检图像,设置最小检测窗口大小为32 × 64 像素,从图像的左下角开始逐行向右每隔一个像素移动检测窗口,直至达到图像边缘为止;
(2) 利用训练模块得到的级联分类器按图1所示方法对各待检子窗口进行判决,完成该级检测窗口大小的扫描: 如果该待检子窗口能通过所有级联分类器则说明其为行人窗口; 如果有任何一个强分类器不能通过就可以判定其为非行人窗口;
(3) 按照试验确定的比例系数放大检测子窗口大小,并按上述步骤重新对待检图像进行扫描,获取较大尺寸的行人目标。
2 基于Kalman 滤波的行人跟踪
使用离散Kalman 滤波预测行人在下一时刻可能出现的区域,缩短目标搜索时间,实现行人的快速跟踪定位。 行人跟踪结果不但能获得行人的运动轨迹,也能为行人的运动分析提供可靠的数据来源。
2. 1 Kalman 滤波算法原理
Kalman 滤波由动态过程模型和反馈修正环节组成。 动态过程模型实现预测功能,反馈修正环节则把增益和残差的乘积作为强制函数作用在模型上。 设系统的状态方程和观测方程如下:

式中: Xk是时刻k 的n 维状态向量; Zk是时刻k的m 维观测向量; n 阶方阵Фk - 1为状态转移矩阵;m × n 阶矩阵Hk为观测矩阵; Wk - 1、Vk是2 个服从正态分布的零均值高斯白噪声序列,方差阵分别为Qk、Rk 。
Kalman 滤波过程可由预测方程:

和滤波递推方程:

表示,其中:

为滤波器增益;

为预测误差方差阵;

为滤波误差方差阵。
2. 2 行人跟踪
根据Kalman 滤波原理,本文对检测得到的车辆前方行人质心位置和行人外接矩形的高度与宽度进行跟踪。 在每帧图像中,行人的状态可以用其质心的位置、位置变化率和外界矩形框的大小来表示。 假设(xt,yt) 代表行人区域质心点在第t 帧图像的像素位置; (Δxt,Δyt) 分别代表质心的变化; (ht,wt) 是包围行人外接矩形的高度和宽度; (Δht,Δwt) 是高度和宽度的变化。 因此,在第t 帧图像中行人的状态向量可以表示为:

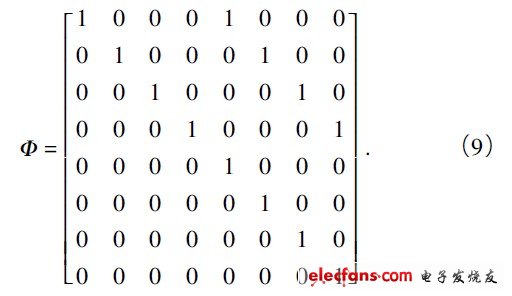
由于行人的运动速度较慢,相邻2 帧图像之间的时间间隔较短,可假设行人在单位时间间隔内做匀速运动,状态转移矩阵可以表示如下:
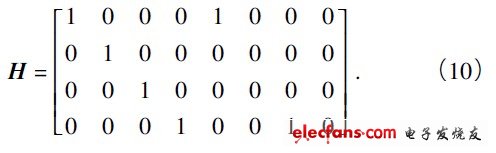
为了观测道路区域各个状态变量,取观测向量Zt = ( xt,yt,ht,wt) T,选取系统测量矩阵为:
为应用Kalman 滤波跟踪车辆前方行人,必须确定状态变量和误差方差矩阵的初始值。 本文在连续2 帧图像成功实现行人的识别定位后开始进行基于Kalman 滤波跟踪。 假设检测到行人的图像是第t 帧和t + 1 帧,初始状态向量X0可表示为:

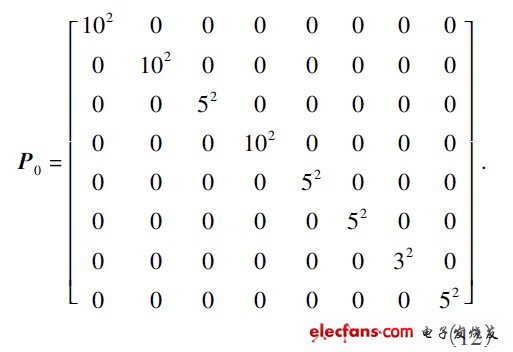
此外,还需要定义相应的协方差矩阵P0 。 由于Pt随着获取更多的图像反复更新,为此可以给它一个较大的初值。 假设预测位置在x 和y 方向上离真实位置具有± 10 个像素误差,在x 和y 方向上速度离真实速度有± 5 个像素误差。 由于行人腿部的运动,使得行人外界矩形的宽度要比高度有较大的变化,所以假设外接矩形窗口的高度与实际行人矩形窗口的高度误差有± 5 个像素,高度的变化率有± 3 个像素误差; 宽度的误差为± 10 个像素,宽度的变化率有± 5 个像素误差。 由此,误差协方差矩阵P0可定义为:
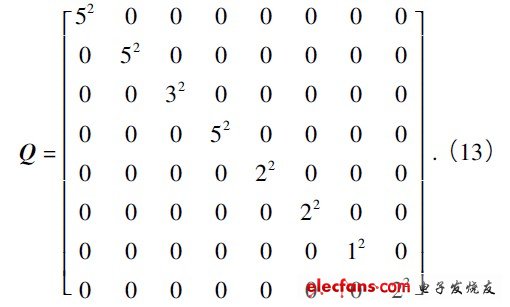
除了X0和P0,还需要估计系统状态方程和测量方程的误差协方差矩阵Q 和R。通过观察,可认为系统状态噪声如下: 在x 和y 方向上系统定位误差的标准偏差是5 个像素,由此进一步认为速度的标准偏差为每帧2 个像素。 而行人外界矩形窗口的高度标准偏差为3 个像素,其变化率为1 个像素,行人矩形窗口宽度的标准偏差为5 个像素,其变化率为2 个像素。 因此,状态变量噪声协方差矩阵可以表示为:
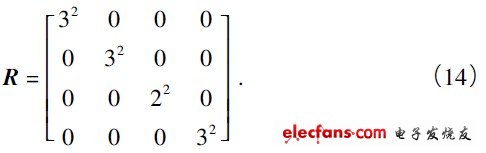
类似地,定义测量方程在x 和y 方向上的标准偏差为3 个像素,高度标准偏差为2 个像素,宽度的标准偏差为3 个像素。 因此:
利用上述的状态预测和更新方程以及初始条
- 电流检测测量在汽车系统中的应用(08-23)
- 分析测量放大器的共模抑制能力(09-15)
- 基于计算机的测量仪器的内部和外部校准(10-08)
- 善用微处理器简化电源供应器设计(10-25)
- 电池内阻及其测量的方法(12-12)
- 直流工作电压测量法(07-10)