红外遥控器在单片机控制系统中的应用
1 概述
单片机控制系统广泛应用在电气设备和电子产品中, 而实现控制的外部操作多由键盘或计算机完成, 有一定的局限性, 比如, 对一些电子产品所显示数据的修改来说, 当安装位置较高时, 按键控制很不方便, 若采用PC, 则除了电路更复杂外, 造价也相应提高。为此, 我们研制了采用普通电视用的红外遥控器做控制器的单片机控制系统。
2 硬件设计
采用MCS251 系列单片机, 选用众合牌电视遥控器, 重新设置按键功能。将红外线接收头的输出端与单片机的外部中断( INT 0 或INT1) 连接, 操作遥控器时, 接收头有信号输出, 单片机产生中断。
2. 1 红外遥控器简介
2. 1. 1 基本组成
红外遥控器的核心是遥控发射集成电路, 众合牌电视遥控器采用的集成芯片是M50462AP, 其内部由图1 中虚线框内各部分电路组成。

图1 遥控发射集成电路
2. 1. 2 工作原理
当遥控器有键被按下时, 振荡电路立即接通并起振, 扫描信号发生器随即发出8 路不同时序的扫描时序脉冲, 依次对键盘矩阵进行扫描, 键盘编码器则由接收到的回送信号判断出被按键位置, 并输出相应的编码至译码器, 经译码器进行码元变换后的信号被重新编码调制后输出。
2. 1. 3 指令代码
集成芯片M50462AP 的输出信号是脉冲位置调制码, 其载频是中心频率为40kHz, 占空比为3 的方波信号。
一位脉冲位置调制码如图2 所示。当脉冲宽度为1ms 时, 代表一个二进制数/ 00; 脉冲宽度为2ms时, 代表一个二进制数/ 10。
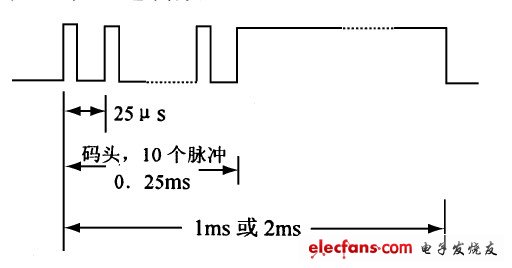
图2 脉冲位置调制码
每一条传送指令由16 位这样的/ 00、/ 10代码组成, 这16 位代码的前8 位为用户码, 用户码的构成形成为1110xx10, 遥控器生产厂家可以将/ x0 设为/ 10或/ 00, 众合牌遥控器的用户码为11100010, 即为E2H; 16 位代码的后8 位为数据码, 即按键功能操作码, 编码则如表1 所列。
表1 按键功能操作码编码表
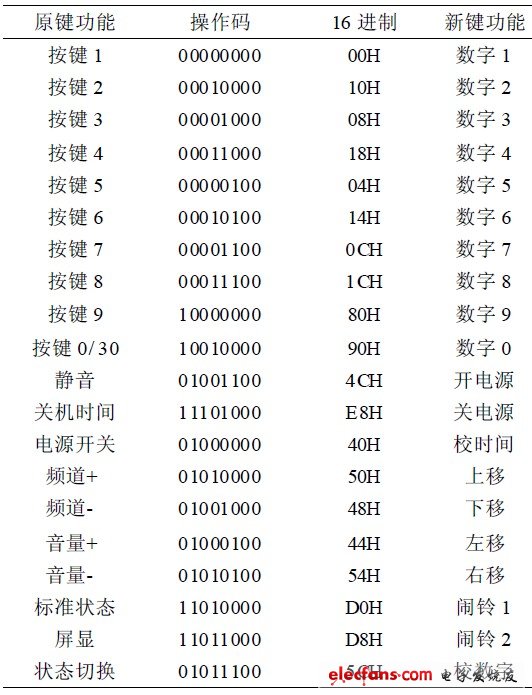
表1 中新键功能可以根据需要自行设定, 这里给出的是我们为电子钟设计的。
遥控器发送一组指令的时间是44ms, 故操作遥控器一次可发出多组指令代码, 以备接收头接收。
我们设计的控制系统需要从中取出3 组数据。
2. 2 接收头的使用
红外接收头通称遥控预放器, 它将接收到的脉冲位置调制码转换成如图3 所示的接收码。接收头使用简单, 只需将它的三个引脚分别接地、+ 5V 电源和CPU 的INT 0 或INT 1 即可。
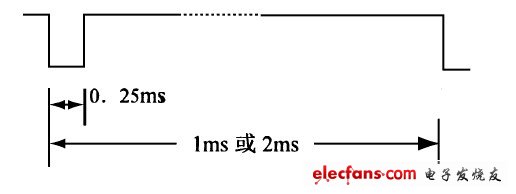
图3 接收码
3 软件设计
本系统旨在识别指令代码并依据指令信息实现新键功能, 我们的思路是在中断服务程序中识别指令代码并保存数据, 用主程序对数据进行比较和处理, 从而实现各种功能。
3. 1 中断服务程序
3. 1. 1 代码的判断
代码的判断是用计数和比较的方法来实现的,进入中断的同时立即打开定时器T 1, 开始计数, 代码/ 00和/ 10的计数时间由其脉冲宽度决定, 分别为1ms 和2ms, 则理论计数值A0、A1 分别可由以下公式得出:
A0= 1ms/ 一个机器周期
A1= 2ms/ 一个机器周期
当单片机采用不同频率的晶振时, 理论计数值也将随之不同。
考虑到遥控器与单片机基准频率的误差, 实际计数值很难保证与理论计数值完全一致, 为此需给/ 00和/ 10的实际计数值开设一个窗口, 以免丢失数据; 同时, 为增强抗干扰性, 窗口宽度应适中, 经过实验, 我们确定的窗口宽度为0. 224ms, 具体数值如表2 所列。
表2 记数窗口数值

当实际计数值在A0L ~ A0H时, 我们认为接收的代码是/ 00; 实际计数值在A1L~ A1H 时, 则将代码记为/ 10。
3. 1. 2 指令的识别
将接收的指令代码逐位存储在单片机RAM 区的2AH~ 2FH 单元中, 则可以存储48 位共3 组指令代码, 存储的有效方式如表3 所列。
表3 存储方式

在表3 中, jjH 表示的是表1 中的任意一个按键的功能操作码, 只有当2A= 2C= E2H, 且2B= 2D=jjH 的时候, 此指令代码才被认为是有效的, 将jjH代表的操作码存入数据暂存单元1EH 中, 主程序即可以使用。
3. 1. 3 中断服务程序流程
程序中, 先将接收的每一位代码作/ 00、/ 10的判别后存储下来, 存满48 位后, 再进行数据是否有效的判别, 最后存储有效的指令代码。程序框图如图4 所示。
图4 中, 移位处理是指2AH~ 2FH 中的6 个字节整体向左移动, 目的是为了防止接收头从某一组指令的中间开始接收数据而造成的数据丢失, 若移位16 次还不能出现有效的指令代码, 则认为此组数据无效。
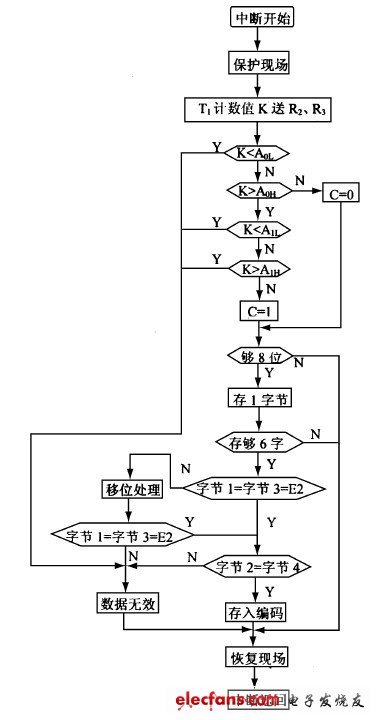
图4 中断服务程序框图
3. 2 主程序
- 一款自学式通用红外遥控系统的设计方案(02-05)
- 基于AT89C51的红外遥控密码锁系统的设计方案(02-19)
- 频分制红外遥控开关电路的设计与实现(11-25)
- 红外遥控多功能电子钟设计方案(02-06)
- LED多功能遥控显示屏设计与实现(05-17)
- 基于Dragonboard 410c android系统红外遥控功能的实现方法(02-22)