基于PIC16F690的直流无刷电机驱动器设计
具有输入阻抗大、开关速度快、无二次击穿现象等特点, 满足高速开关动作需求, 因此采用IR 公司的场效应管IRF9540和IRF540构成H 桥电路的桥臂。H 桥电路中的4个功率MOSFET 分别采用n沟道型和p沟道型, 设计的电路原理, 如图4所示。
数字电平上下跳变时, 集成电路耗电发生突变,引起电源产生毛刺。数字电路越复杂, 数据速率越高, 累计的电流跳变越强烈, 高频分量越丰富, 而普通印刷电路板不能完全吸收逻辑电平跳变产生的电压毛刺, 这种噪声会严重干扰电路。为了实现模拟电路和数字电路的隔离, 提高信噪比, 有效的抑制噪声对模拟电路的干扰, 在PWM 信号从控制系统引出之后, 需要经过光电隔离, 才能送入驱动电路。在不影响驱动器整体性能的前提下, 使用TLP521- 1光电耦合器, 主要考虑的是价格因素。
运放2902在电路中用作比较器, 把输入逻辑信号同基准电压比较, 转换成接近功率电源电压幅度的方波信号。运放的输入电压范围不能接近负电源电压, 否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管D 13。输入端的电阻R 50用于限流,R66用于在输入悬空时把输入端降为低电平。
当运放2902 输出端为低电平时, 三极管Q25截止, 场效应管Q23导通。三极管Q16导通, 场效应管Q19截止, 输出为高电平。当运放输出端为高电平时,三极管Q25导通, 场效应管Q23截止。三极管Q16截止, 场效应管Q19导通, 输出为低电平。

图4 基于MOSFET的驱动电路设计
3 系统软件设计
软件设计采用汇编语言编写, 在M plab集成开发环境中进行编译、仿真, 用软件来实现硬件的功能,不但可以降低成本, 提高系统的可靠性, 还能简化硬件结构, 但其缺点是响应时间比用硬件实现长, 而且还要占用CPU 时间。设计过程中, 在满足可行性和实时性的前提下尽可能地将硬件功能用软件来实现, 系统主程序流程图, 如图5所示。
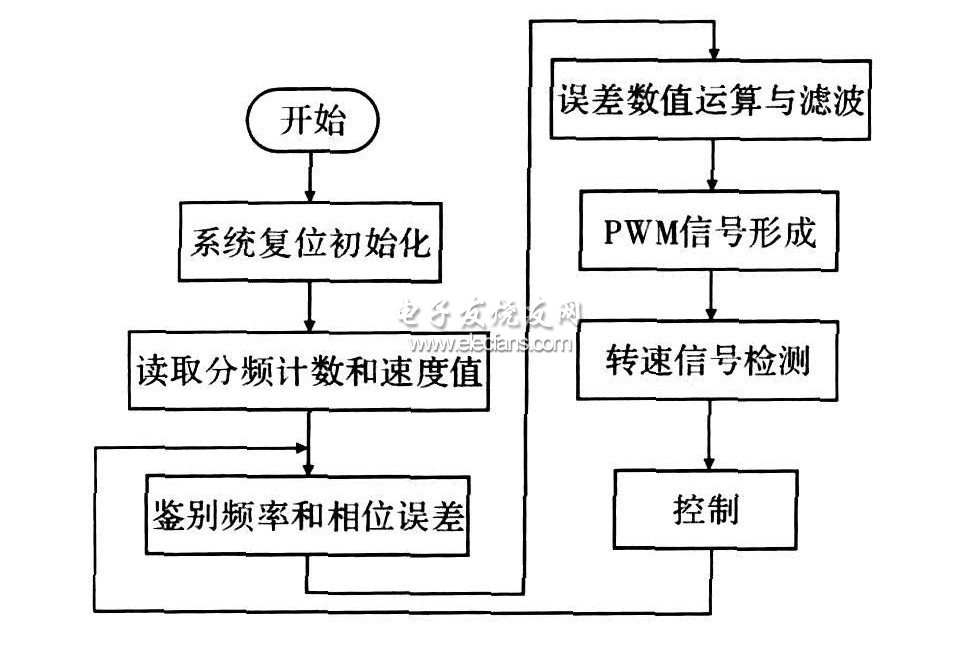
图5 控制系统主程序流程图
4 结语
干扰现象是电路调试和设计时必须考虑和重点解决的问题, 不同电路其干扰源千差万别, 干扰传播途径也多种多样, 干扰现象也各不相同, 但它们仍有共性。在控制系统设计中, 将控制电路和驱动电路分两块板布局, 其中驱动板的PCB 设计, 如图6 所示,经实验证明, 抗干扰措施取得了较理想的效果。

图6 驱动电路PCB板设计图
- 恒照度自适应调光的LED驱动器设计(02-26)
- MCP8063三相正弦无传感器无刷电机工业控制驱动方案(07-04)
- 未来的电机终归“无刷”(03-13)
- 示波器在直流无刷电机行业的典型应用(10-16)
- 示波器在直流无刷电机行业的应用案例解析(10-22)
- 基于Motionchip的直流无刷伺服电机运动控制系统设计(04-19)