恒照度自适应调光的LED驱动器设计
本文针对传统照明能效低、耗电量大等问题,设计了LED恒照度调光驱动器。系统使用恒流LED控制芯片NCL30160作为LED光源驱动电路,采用TSL2561光照度传感器采集室内光照度,通过处理器相应算法进行闭环控制,实现室内的恒照度调光。该算法实现了PWM波形平滑变化,避免因PWM突变造成闪光。同时,系统增加了人体运动控制,实现无人、有人时的不同调光方案,使设计进一步节能和智能化。
1 系统简介及工作原理
系统由PIC16F690单片机、 TSL2561光照度传感器、LED光源和LED驱动电路4部分组成。由于LED的亮度与工作电流成正比,故调节工作电流即可调节LED的发光亮度。目前主要有调节正向电流和脉冲调制调光两种调光方法。由于脉宽调制调光具有不会产生任何色彩偏移、调光精度高、结合数字技术调光、调光范围宽、不闪烁等优点,故本文选用脉冲调制调光。
系统主要由TSL2561采集光照度反馈给PIC16F690处理芯片,经过PIC16F690进行相应的算法处理,输出随光照度规律变化的PWM波形,经过带有PWM接口的驱动电路驱动LED灯从而实现调光。系统框图如图1所示。

图1 恒照度调光的LED驱动器系统框图
同时,在本系统中加入了人体运动控制以及按键控制,能够检测人体运动,实现在无人时自动关闭LED灯,进一步减少电能浪费;按键能够调节PWM波形的频率以及设定环境最大光照度,使系统更为人性化。
1.1 PIC16F690单片机
PIC16F690单片机具有高性能的RISC CPU、低功耗以及丰富的外设资源,能够满足本系统的硬件资源需求。由于该款单片机资源丰富,既满足系统需求,又不十分浪费资源,故降低了控制器成本。
1.2 TSL2561光照度传感器
TSL2561是TAOS公司推出的一种高速、低功耗、宽量程、可编程灵活配置的光强度数字转换芯片。该芯片的应用能够提供最好的显示亮度并降低电源功耗。TSL2561具有以下几个特点:
①可编程配置许可的光强度上下阈值,当检测光照度超过阈值时能产生中断信号;
②数字输出符合标准的SMBus和I2C总线协议;
③可编程控制模拟增益和数字输出时间;
④超小封装和超低功耗;
⑤自动抑制50 Hz/60 Hz的光照波动。
TSL2561 的内部结构如图2所示。其内部有两个光敏二极管通道,即通道0和通道1,其中通道0对可见光和红外线都敏感,通道1仅对红外线敏感。流过光敏二极管的电流经过积分式A/D转换器转换为数字量,转换完后将数字量存入芯片内部的寄存器中。积分式A/D转换器将在一个积分周期完成后自动进行积分转换过程。 TSL2561可以通过对其内部16个寄存器设定来控制,该16个寄存器可通过标准的SMBus或者I2C总线协议访问。
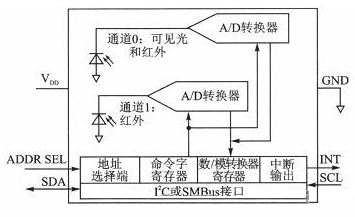
图2 TSL2561的内部结构
2 硬件设计
2.1 控制电路设计
控制电路主要由PIC16F690的最小系统组成,包括复位电路、输入按键电路、下载调试电路、供电电路、晶振电路以及相应的信号输入/输出接口。
由于本系统的研究重点在于调光算法,且系统属于小功率,故供电电路采用简单实用的阻容电路。芯片供电电压为3.3 V,采用ASM1117稳压芯片。
下载调试电路根据微芯公司提供的资料,采用微芯集成仿真器ICD3,接口电路根据官方资料设计。复位电路以及晶振电路按照常用电路设计。总体硬件框图如图3所示。
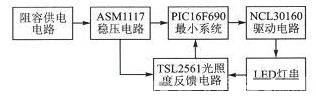
图3 总体硬件框图
2.2 驱动电路设计
图 4为基于恒流LED控制芯片NCL30160的LED驱动电路。NCL30160是安森美半导体推出的一款NFET迟滞降压、恒流LED驱动器。它将电流提升到了1.5 A,是新一代高能效的解决方案,损耗非常低,体积很小,可最大限度地减少空间和成本。通过利用仅55 mΩ的低导通阻抗内部MOSFET及以100%占空比工作的能力,能够提供能效高达98%的方案。最高1.4 MHz的高开关频率使设计人员可采用更小的外部元件,将电路板尺寸减至最小及成本降至最低。
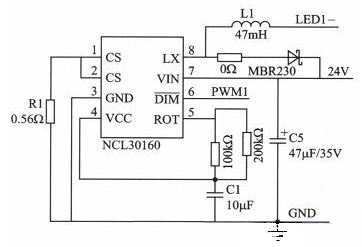
图4 驱动电路图
根据NCL30160的数据手册及输出要求计算外围器件参数。系统采用5颗1 W的LED串联,恒定电流为350 mA。
R1=200 mV/ILED=200 mV/350 mA≈0.56 Ω (1)
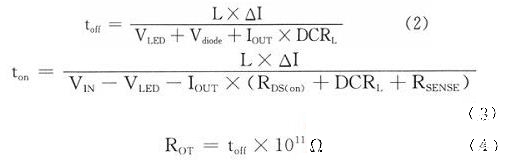
式中,ILED为LED灯串电流。图4中的C5采用官方数据手册推荐的取值。电感L1及ROT由式(2)~(4)得到。式中,toff、ton、△I、RDS(oN)的取值参考数据手册;VIN在此处取为24 V,DCRL为电感电阻,此处取为0 Ω。
3 软件设计
软件设计包括主程序设计、I2C总线通信程序设计、调光算法设计,以及运动控制和按键输入程序设计4部分,是实现系统智能化控制的核心。
3.1 主程序设计
图5为主程序流程图。主程序的作用是选择是否改变PWM频率及照度
- 基于PIC16F690的直流无刷电机驱动器设计(07-17)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- LED向“绿色”转变需要高性能LED驱动器(08-17)
- 省电、高亮度LED需要高性能LED驱动器(08-16)
- LED照明的操作要求对驱动器IC性能构成压力(08-17)
- 大电流/高速LED驱动器彻底改变了PWM调光(08-19)