示波器在直流无刷电机行业的应用案例解析
近年来,无刷电机在医疗,工业控制,消费电子和汽车电子等高精度控制行业广泛应用,无刷电机性能的好坏很大程度上取决于电机驱动器,研发阶段,工程师如何借助示波器快速、便捷、真实的对驱动器信号进行分析?本文主要介绍ZDS4054Plus数椐挖掘型示波器对电机驱动器的典型测试及案例分析。
作为电机行业的"新人", 无刷电机是实至名归的后起之秀,以狂浪之势涌入医疗,工业控制,消费电子和汽车电子等高精度控制行业,"无刷"是不是未来电机行业的发展趋势?本文以案例的形式扒一扒无刷电机那些事!
一、直流无刷电机介绍
随着电力电子的发展和新型永磁材料的出现,无刷直流电机得到了迅速发展,无刷直流电机通过电子器件实现了电机的换相,取代了传统的机械电刷和换相器。其由电动机主体和驱动器组成,是一种典型的机电一体化产品。 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等。无刷电机凭借噪声低、寿命长、转速高、体积小、动态性能好、输出力矩大、设计简便等特点,在医疗、工业控制、消费电子、电动工具、电动车等领域广泛应用。

二、无刷电机的工作原理
首先,看一下无刷电机驱动器的框图,如下:
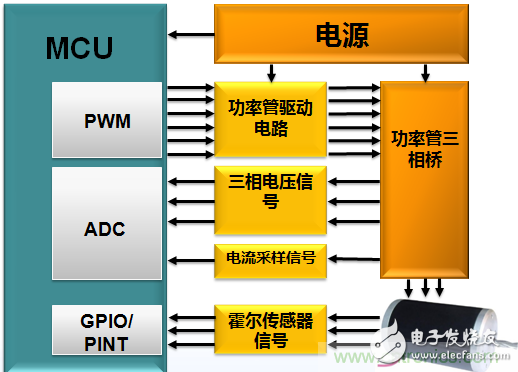
有上图可知,MCU通过配置寄存器输出六路PWM只是控制信号,其最高电压也只有5V,不能直接驱动电机,而是通过控制功率管的开关来使电机运行,驱动电路一般是由多个MOSFET组成的驱动桥和电机驱动桥功率管构成。无刷电机的换向是换相是依靠转子位置的检测进行的,其中有感驱动方式是利用霍尔传感器检测转子位置的,无感驱动方式是通过检测和计算无刷电机转动过程中的电流、电压等参数变化,推测转子位置,进而进行换相的。
换向原理

无刷电机内部安装有霍尔传感器,其可以根据转子不同位置时的不同磁场方向分布情况,而给出1或0的输出信号,三个传感器均匀安装,在360度的电角度上发生6次翻转电平,每次相差60度电角度,根据三个传感器的信号编码测出转子的位置,这就是常用的有感驱动方式。另外,无感驱动方式是通过检测和计算无刷电机转动过程中的电流、电压等参数变化,推测转子位置,进而进行换相的。
驱动电路工作原理
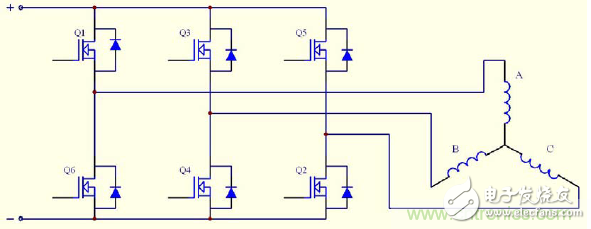
驱动电路简化图
图中Q1到Q6为功率场效应管,当需要AB相导通时,只需要打开Q1, Q4管,而使其他管保持截止。此时,电流的流经途径为:正极→Q1→线圈A→绕组B→Q4→负极。MCU给Q1的栅极是PWM信号,而给Q4的栅极是常开信号,这样你就可以通过控制Q1输入端的PWM信号占空比来控制驱动电机的有效电压。其他五步换向导通也是这样。实测各相波形如下:

各相电压波形实测效果
三、ZDS4054Plus的实测应用与分析
针对上述无刷电机驱动器的PWM信号分析,ZDS4054Plus示波器又有哪些新的测试体验呢?
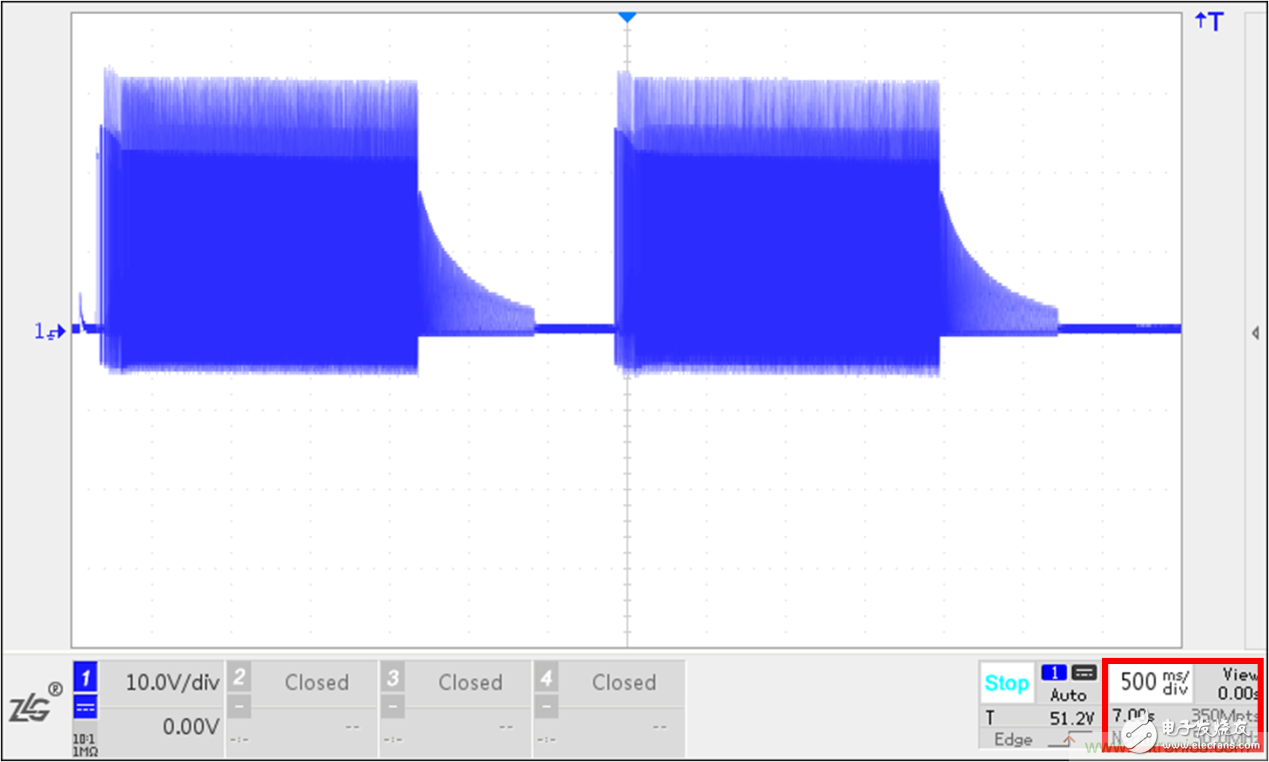
512Mpts大数椐存储
针对案例中无刷电机的驱动电压,工程师在观察PWM信号时,若信号中出现异常,则难以通过触发方式触发,需要在大时基下,通过缩放模式分析包络内的信号,(在缩放窗口观察波形细节),PWM信号频率几十K以上,需要保证较高的采样率,同时PWM信号还伴随有电流、编码器等载波信号,需要多个通道分别观察,从波形时间、采样率、多通道三方面看,都需要大存储。图1为无刷电机PWM驱动信号,在存储深度设为350M时,捕获7S的波形,采样率依然高达50M Sa/s,保证了波形不失真。由公式:存储深度=波形时间*采样率可知,ZDS4000系列示波器标配512Mpts存储深度,保证在捕获长时间波形同时保持高采样率。
双ZOOM模式+智能标注
如上图,在捕获较长时间的波形后,如何对PWM驱动信号或异常信号进行分析呢?另外,在工业伺服应用方面,在不同的工况下,在切换不同负载的时候,对应不同时间的驱动器波形变化或出异常信号,整个负载切换到稳定的过程时间较长,也需要在大存储深度下,观看波形细节,针对上述情况,ZDS4000系列示波器在保证大存储深度的情况下,支持双ZOOM缩放模式,可以为两个缩放窗口分别设置系数,配合智能标注功能,对任意处感兴趣的信号进行标注。图中为对PWM驱动信
- MCP8063三相正弦无传感器无刷电机工业控制驱动方案(07-04)
- 未来的电机终归“无刷”(03-13)
- 基于PIC16F690的直流无刷电机驱动器设计(07-17)
- 示波器在直流无刷电机行业的典型应用(10-16)
- 基于Motionchip的直流无刷伺服电机运动控制系统设计(04-19)
- 计算机labview对示波器的远程控制技术分析(06-26)