浅析直流伺服电动机与交流伺服电动机,直流伺服电动机的驱动模块解析
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。

1、直流伺服电动机
直流伺服电动机实际上就是他励直流电动机,其结构和原理与普通的他励直流电动机相同,只不过直流伺服电动机输出功率较小而已。
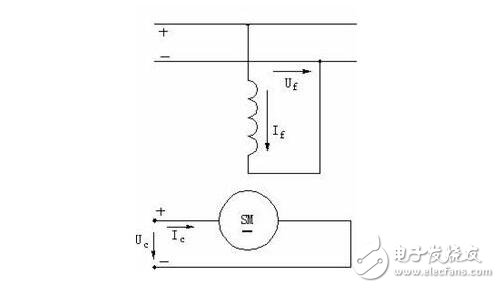
电枢控制:把控制信号加到电枢绕组上,通过改变控制信号的大小和极性来控制转子转速的大小和方向;磁场控制:把控制信号加到励磁绕组上进行控制。
直流伺服电动机进行电枢控制时,电枢绕组即为控制绕组,控制电压直接加到电枢绕组上进行控制。而励磁方式则有两种:一种用励磁绕组通过直流电流进行励磁,称为电磁式直流伺服电动机;另一种使用永久磁铁作磁极,省去励磁绕组,称为永磁式直流伺服电动机。
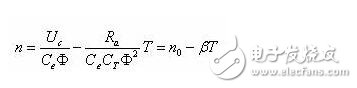
(1)机械特性
改变控制电压Uc,而机械特性的斜率不变,故其机械特性是一组平行的直线。
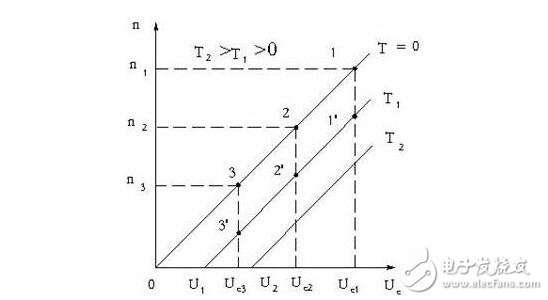
(2)调节特性
调节特性是指在一定的转矩下电机的转速n与控制电压Uc的关系。
由调节特性可以看出,当转矩不变时,如增强控制信号Uc,直流伺服电动机的转速增加,且呈正比例关系;反之减弱控制信号Uc减弱到某一数值U1直流伺服电动机停止转动,即在控制信号Uc小于U1时,电机堵转,要使电机能够转动,控制信号Uc必须大于U1才行,故U1 叫做始动电压。
电枢控制时的直流伺服电动机的机械特性和调节特性都是线性的,而且不存在"自转"现象。
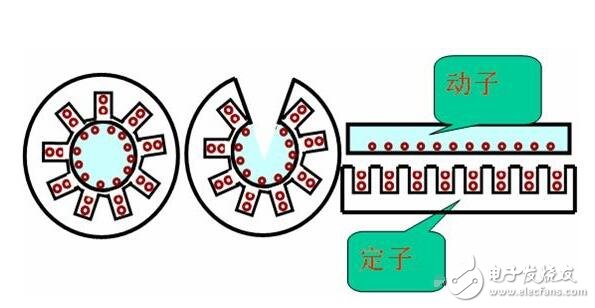
2、交流伺服电动机
交流伺服电动机实际上就是两相异步电动机,所以有时也叫两相伺服电动机。电机定子上有两相绕组,一相叫励磁绕组f,接到交流励磁电源Uf上,另一相为控制绕组c,接入控制电压Uc ,两绕组在空间上互差90°电角度,励磁电压Uf和控制电压Uc频率相同。
交流伺服电动机的工作原理与单相异步电动机有相似之处。当交流伺服电动机的励磁绕组接到励磁电流Uf上,若控制绕组加上的控制电压Uc为0时(即无控制电压)所产生的是脉振磁通势,所建立的是脉振磁场,电机无起动转矩;
当控制绕组加上的控制电压不为0,且产生的控制电流与励磁电流的相位不同时,建立起椭圆形旋转
磁场(若Ic与If相位差为90°时,则为圆形旋转磁场),于是产生起动力矩,电机转子转动起来。如果电机参数与一般的单相异步电动机一样,那么当控制信号消失时,电机转速虽会下降些,但仍会继续不停地转动。伺服电动机在控制信号消失后仍继续旋转的失控现象称为"自转"。
可以通过增加转子电阻的办法来消除"自转"。
直流伺服电动机的驱动模块
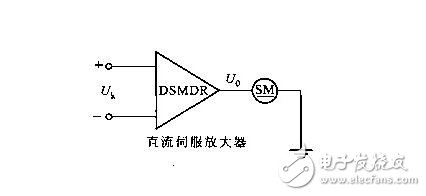
由于直流伺服电动机实际上就是一台小容量的他励直流电动机,因此,普通直流电动机的各种驱动模块实际上均可用来驱动直流伺服电动机。但是,一般而言,直流伺服电动机的容量远小于普通驱动用直流电动机,即电枢驱动容量较小,而普通直流电动机的驱动模块通常都是应用于中大容量的电动机作为电力驱动。另外,作为伺服电动机由于其控制的线性度、灵敏性和快速性等的特殊要求,对驱动模块的动静态特性也有相应的要求。因此,直流伺服电动机往往需要有自己专门的驱动模块。适用于直流伺服电动机的典型驱动电路实际上是一种直流线性功率放大器,它将直流控制信号直接进行电压和功率放大而驱动直流伺服电动机,如图1所示。因此,直流伺服电动机的驱动模块又叫做直流伺服放大模块。
(1)直流伺服电动机驱动模块的基本形式及原理
原理上,直流伺服电动机驱动模块也由功率电路和控制电路两部分构成。而功率电路原理上有两种基本形式,这两种基本形式分别叫电压控制型(DSMDRV)和电流控制型(DSMDRC)。
(2)用功率电子器件构成的驱动模块DSMDR
用功率电子器件可以构成一种带限流功能的电压控制型双向驱动模块,
(3)用功率集成电路构成DSMDR驱动模块
由于直流伺服电动机通常是低电压小功率。因此,可以采用一些通用功率集成电路构成直流伺服放大器直接驱动直流伺服电动机。此外,目前市场上已有专用于驱动直流伺服电动机的专用功率集成电路。这种集成电路具有很大的输出电流能力且用它们构成直流伺服放大
- 直流伺服电动机的基本类型分类与直流伺服电动机的特性分析(05-16)
- 直流伺服电动机的技术参数与特性参数,直流伺服电动机的特点特性及种类(05-16)
- 伺服运动控制系统及数控加工原理及应用(05-29)
- 基于PLC和脉冲伺服在枕式包装机上的应用(07-12)
- 单轴伺服驱动系统在排线装置中的应用(06-17)
- 东能伺服在绕线机上应用(04-28)