直流伺服电动机的基本类型分类与直流伺服电动机的特性分析
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。

直流伺服电动机的基本类型
直流伺服电动机也有电磁式和永磁式两种,但多为永磁式。它的良好控制性能主要是由于具有特殊的转子结构。根据其结构的不同,直流伺服电动机有以下的几种类型。
(1)普通电枢直流伺服电动机
这种伺服电动机具有与动力直流电动机基本相同的结构。即电磁式或永磁式定子,转子由带槽的铁心和嵌放于槽中的电枢绕组构成。但相对而言,电枢的长度与直径比较大,即它属细而长型转子。大中容量的直流伺服电动机一般都是这种结构,产品容量从几瓦到几百瓦甚至数千瓦。同时也由于这种转子结构,使它具有较强的负载能力,较大的堵转转矩,因此它特别实用于大负载的伺服系统。但由于转子结构复杂、体积较大,使得该电动机的机械惯性(时间常数)较大,低速时运行平稳性较差,控制死区较大。
(2)盘形电枢直流伺服电动机
这种电动机定子为永磁式。它的转子为一圆盘结构(即长度直径比小于1),电枢有线绕式(线绕盘式)和印刷电路式(印刷盘式)之分。该电动机结构简单、体积小、转子重量轻,因此,转子的机械惯性小(通常机种的机械时间常数小于30眦),但堵转转矩小。线绕盘式电动机容量可达数千瓦,印刷盘式的容量小一些。
(3)空心杯电枢直流伺服电动机
该电动机转子以一空心杯构体为骨架,其杯壁上放置(或印制)电枢绕组。其电枢绕组可以是绕线式绕组也可以是印刷式绕组。定子为永磁式。这种伺服电动机以机械惯性极小著称,控制灵敏度高,几乎无控制死区,其体积可做得非常小且重量轻。但堵转转矩较小,目前它的容量还不能做得很大,是一种微型伺服电动机。
(4)无槽电枢直流伺服电动机
无槽电枢直流伺服电动机与普通电枢直流伺服电动机的唯一区别是它的转子铁心不开槽,电枢绕组用固定胶粘贴在电枢表面。这种伺服电动机具有较大的负载能力,较大的堵转转矩,电动机容量可以做的较大,低速平稳性好。
(5)直流伺服齿轮减速电动机
这种伺服电动机是将微型直流电动机和一套高精度齿轮减速装置组装成一整体。直流伺服电动机的输出转速经过减速机构减速输出。因此,这种电动机的最大特点是可以输出极低的速度(可低达零点几转每分)且低速时运行非常平稳。它特别适用于低速大力矩系统。
(6)直流力矩电动机
直流力矩电动机是一种低速大力矩伺服电动机。它能在不需要中间减速机构的情况下直接拖动负载实现低速大力矩的平稳运行,甚至可以工作在堵转情况下且无爬行现象,又具有很高的稳速精度。因此,特别适用于那些常用于较低速度且又有相当负载能力要求的场合。直流力矩电动机在结构上和普通电枢直流伺服电动机相同。它的定子主磁极数较多(通常6。8极),它通常做成扁平结构,电枢长度与直径之比一般仅为0.2左右(即外表呈现圆盘状)。它有内装式和分装式两种结构。内装式与一般电动机一样由生产厂装配成一整体。分装式将定子、转子和刷子三大部分分离出厂,使用时现场装配,转子直接套在负载轴上,机壳可根据需要自行选配。

直流伺服电动机的特性分析
直流伺服电动机采用电枢电压控制时的电枢等效电路如图1所示。
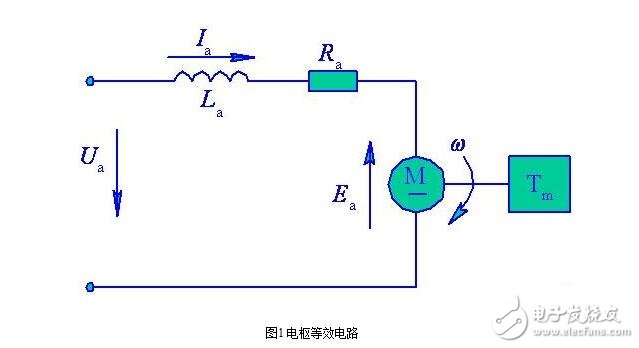
当电动机处于稳态运行时,回路中的电流Ia保持不变,则电枢回路中的电压平衡方程式为
Ea=Ua-IaRa? (6-1)
式中,Ea是电枢反电动势; Ua是电枢电压;Ia是电枢电流;Ra是电枢电阻。
转子在磁场中以角速度ω切割磁力线时,电枢反电动势Ea与角速度ω之间存在如下关系:
Ea=CeΦω (6-2)
式中,Ce是电动势常数,仅与电动机结构有关;Φ是定子磁场中每极的气隙磁通量。
由式(6-1)、式(6-2)得
Ua-IaRa=CeΦω(6-3)
此外,电枢电流切割磁场磁力线所产生的电磁转矩Tm可由下式表达:
Tm=CmΦIa
则 Tm=CmΦIn

式中,Cm是转矩常数,仅与电动机结构有关。
将式(6-4)代入式(6-3)并整理,可得到直流伺服电动机运行特性的一般表达式

由此可以得出空载( Tm=0,转子惯量忽略不计)和电机启动(ω=0)时的电机
- 浅析直流伺服电动机与交流伺服电动机,直流伺服电动机的驱动模块解析(05-16)
- 直流伺服电动机的技术参数与特性参数,直流伺服电动机的特点特性及种类(05-16)
- 伺服运动控制系统及数控加工原理及应用(05-29)
- 基于PLC和脉冲伺服在枕式包装机上的应用(07-12)
- 单轴伺服驱动系统在排线装置中的应用(06-17)
- 东能伺服在绕线机上应用(04-28)