交流伺服电机的变频调速解析,交流伺服电机的SPWM变频调速
交流伺服电动机的结构主要可分为两部分,即定子部分和转子部分。其中定子的结构与旋转变压器的定子基本相同,在定子铁心中也安放着空间互成90度电角度的两相绕组。其中一组为激磁绕组,另一组为控制绕组,交流伺服电动机是一种两相的交流电动机。 交流伺服电动机使用时,激磁绕组两端施加恒定的激磁电压Uf,控制绕组两端施加控制电压Uk。当定子绕组加上电压后,伺服电动机很快就会转动起来。 通入励磁绕组及控制绕组的电流在电机内产生一个旋转磁场,旋转磁场的转向决定了电机的转向,当任意一个绕组上所加的电压反相时,旋转磁场的方向就发生改变,电机的方向也发生改变。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。

交流伺服电机定子的构造基本上与电容分相式单相异步电动机相似。其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电机的变频调速

只要改变交流伺服电机的供电频率f1,即可改变电机转速,所以交流伺服电机调速应用最多的是变频调速。
变频调速的主要环节是:为交流电机提供变频电源的变频器。
变频器分:交-交变频;交-直-交变频。
(1)交-交变频
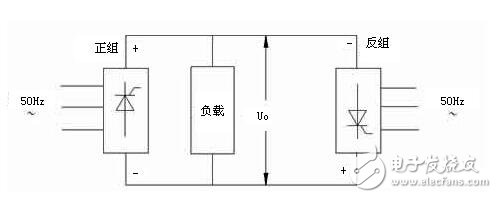
利用可控硅整流器直接将工频交流电(频率50Hz)变成频率较低的脉动交流电,正组输出正脉冲,反组输出负脉冲,脉动交流电的基波是所需的变频电压。
该方法所得的交流电波动比较大,且最大频率即为变频器输入的工频电压频率。
(2)交-直-交变频
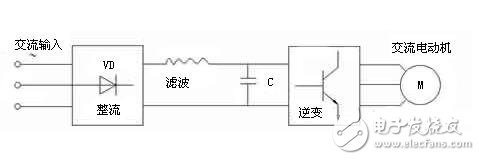
先将交流电整流成直流电,然后将直流电压变成矩形脉冲波电压,矩形脉冲波的基波是所需的变频电压。
该调频方式所得交流电的波动小,调频范围比较宽,调节线性度好。
在交-直-交变频中根据中间直流电压是否可调分为中间直流电压可调PWM逆变器和中间直流电压固定的PWM逆变器;根据中间直流电路储能元件是大电容还是大电感分为电压型逆变器和电流型逆变器。
SPWM(正弦波PWM)变频器是目前应用最广、最基本的一种交-直-交型电压型变频器,在交流调速系统中获得广泛应用。
SPWM变压变频器调制原理(以单相为例)
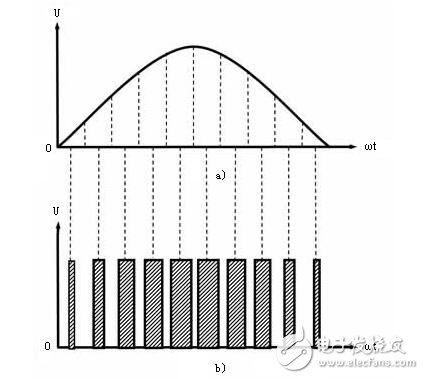
正弦脉宽调制(SPWM)波形:与正弦波等效的一系列等幅不等宽的矩形脉冲波。
等效原理:把正弦波分成n等分,每一区间面积用与其相等的等幅不等宽的矩形面积代替。正弦波的正负半周均如此处理。
SPWM控制波的生成:正弦波—三角波调制。
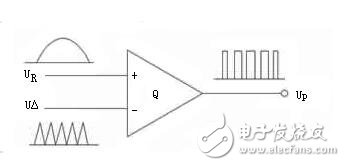
Q——电压比较器;
UR——由指令脉冲转换来的,正弦控制波;
UΔ——三角波发生器。
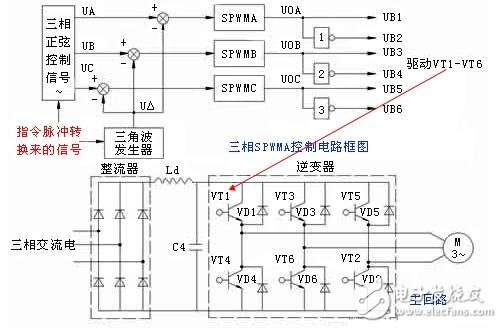
整流器将三相工频交流电变成直流电;
逆变器将直流电压逆变成三相交流电,驱动电机运行。
交流伺服电机SPWM变频调速方法
交流电机变频调速系统中的关键部件之一就是逆变器,由于调速的要求,逆变器必须具有频率连续可调、以及输出电压连续可调,并与频率保持一定比例关系等功能。
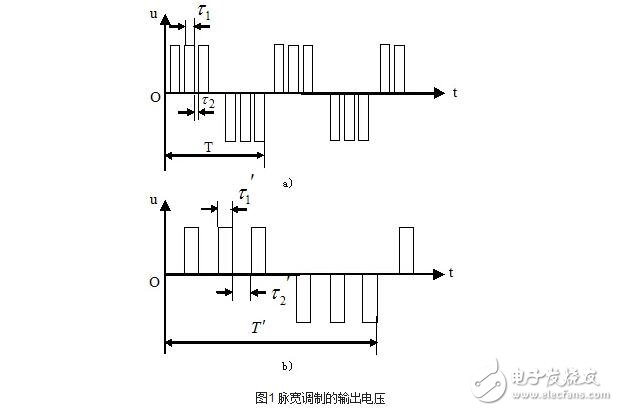
利用脉冲宽度调制逆变器可实现变频也变压。如图所示,因电压的平均值和占空比成正比,所以在调节频率时,改变输出电压脉冲的占空比,就能同时实现变频和变压。与图1(a)相比,图1(b)所示电压周期增大(频率降低),而占空比减小,故平均电压降低。
采用PWM方法控制逆变管的通、断时,可获得一组幅值相等、宽度相同的矩形脉冲,改变矩形脉冲的宽度可控制其输出电压,改变调制周期可控制其输出频率,同时实现变压和变频。因输出电压波形为矩形波,具有许多高次谐波成分。对电机来说,有用的是电压的基波。为了减少谐波影响,提高电机的运行性能,应采用对称的三相正弦波电源为三相交流电机供电。
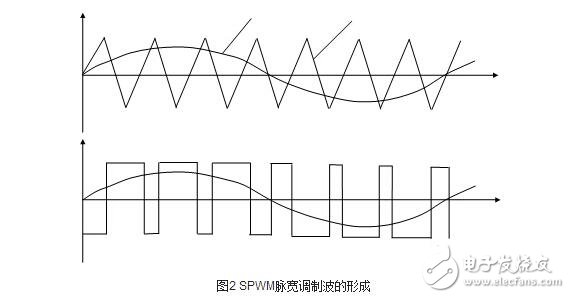
正弦波脉宽调制型逆变器(SPWM)的输出端可获一组等幅而不等宽的矩形脉冲波形,来近似等效于正弦电压波。SPWM脉宽调制波形,如图2。当正弦值为最大值时,脉冲的宽度也最大,而脉冲的间隔则最小。反之,当正弦值较小时,脉冲的宽度也小,而脉冲的间隔则较大,这样的电压脉冲系列可以使负载电流中的高次谐波成分大大减少。
采用数字电路的SPWM逆变器,可采用以软件为基础的控制模式。优点是所需硬件少,灵活性好和智能性强。缺点是需要通过计算确定SPWM的脉冲宽度,有一定的延时和响应时间。随
- 交流伺服电机的分类、特点及其闭环驱动(05-09)
- 浅析交流伺服电机的矢量控制(05-08)
- 伺服运动控制系统及数控加工原理及应用(05-29)
- 基于PLC和脉冲伺服在枕式包装机上的应用(07-12)
- 单轴伺服驱动系统在排线装置中的应用(06-17)
- 东能伺服在绕线机上应用(04-28)