VR动捕技术如何成为VR产业飞速发展的香饽饽
过光学识别的做法总是能够得到标记点在当前空间的绝对位置坐标,因此不存在任何的累积误差。
当然,要得到标记的正确空间位置,每一台参与运算的摄像机自身的位置和姿态信息也必须是固定的。
如果表演过程中某位送茶水的剧务人员,或者激动得忘乎所以的演员本人撞到了摄像机,导致它的位置发生哪怕一丁点的变化,都不得不叫停整个片场并且重新校准所有设备。这是一个绝对痛苦的过程,不过也是电影人司空见惯的场面,毕竟电影的拍摄是一个CUT接着另一个CUT的,不用预先准备好足够大的场地让博尔特飞奔,也不用真的布置一片浩瀚宇宙让绝地武士再临,更不用在月黑风高的夜里布设实景(都是绿色的摄影棚嘛)。在这种情况下,空间和时间的限制因素也就不那么重要了。
但是如果有这样一种方案呢?它同样可以跟踪很多的关键点,具有很高的采样频率和足够的精度,计算简便而且能够快速回放甚至实时呈现,可以更自由地穿戴和行走自如,白天黑夜想用就用,也不用担心碰到什么奇怪的物事而被迫重新来过……最重要的是,够便宜?
听起来像是臆想,然而这样的大馅饼确实是存在的,那就是基于惯性传感技术的运动捕捉方案。

传统的MEMS惯性传感设备包括加速度计,陀螺仪,地磁传感器以及大气压力传感器,它的成本非常低(十几块钱的芯片),体积极小(一元硬币),质量很轻(小于一元硬币),输出稳定且不易受到干扰(当然强磁场除外),对外部环境条件的适应性极强(冷热酸甜想吃就吃),而且现在几乎随处都能买到。
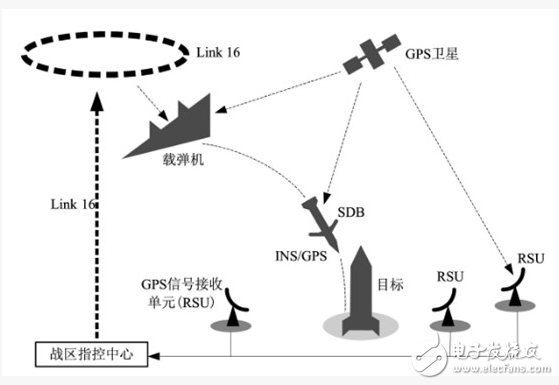
这样一组惯性测量单元组合起来,早已被广泛应用在军事和航空领域,例如那个让我们耳熟能详的名词——惯性制导系统。在这个概念的基础上再上升一层,加上GPS的修正,那就快要进入导弹的原理范畴以及TMD和NMD防御体系了。
当然导弹惯导系统中采用的激光陀螺通常精度极高,价格昂贵而且体积也更大,不过这些显然已经不是我们应该关心的事情,虽然笔者对此其实颇有爱好(图中的SDB表示小口径炸弹,然而解释它也并没有什么卵用):
而来自加速度计,陀螺仪以及地磁场的XYZ三个轴向的传感器数据值,也就是很多初创者常说的"九轴传感器"的概念了,当然这九个数值直接拿过来并没有实际的价值,还要经过一个名为"Sensor Fusion"的算法进行融合,相互填补空白数据和测量数据误差,有必要的再基于Kalman滤波等常见的数据平滑方案进行后处理(然而这样会造成一定的延迟),进而得到一个流畅连续的三轴方位角度输出数据。
这一运算过程当中如果没有地磁场数据的支持,那么得到的角度值是没有参考位置的,也就是相对于系统启动时刻的角度信息;如果有地磁场数据作为参考,那么就可以得到绝对的世界坐标系角度,然而这一数据往往会受到其它人为强磁场的干扰,包括一些金属制品和大型演出桁架的干扰。
那么能否基于这些数据,得到关键点在空间的位移信息呢?
答案是肯定的,事实上从数学上来说,对加速度值进行积分的结果就是速度,而再次进行积分的结果就是位移了。
其它两个传感器的数据同样可以参与到融合算法当中并补充测量空白,然而——这回就没有可以作为参考的绝对参数了,因为地磁场的数据并不能作为测量空间绝对位置的标准。
这个问题对于所有的惯性控制设备来说都是非同小可的,因为不存在绝对的参考物可以进行反馈和纠正(光学动捕的时候只要摄像机姿态不变,就可以知道下一帧图像在相机参考系中的位置信息),因此每次测量结果的微小误差会逐渐进行累积,最终让原本稳坐钓鱼台的角色平地飞起,或者让飞向太空的火箭跌入阴沟。
导弹惯导系统是可以主动修正位置的误差的,因为有GPS辅助定位;然而放到惯性动捕的设备当中,却显得回天乏术了。不过这并不妨碍Xsens以及其他厂商将他们的产品买到世界各地,因为大多数情况下,拍摄电影的人并不会移动得那么远;而惯性动捕方案的超低廉成本和简便成熟的处理流程,以及完全实时的数据计算和回传机制,则会让更多小成本的团队趋之若鹜。
这也就是Xsens敢把全套动作捕捉设备卖到46万上下的原因,也是诺亦腾敢把专业动作捕捉系统从28万一套卖到10万一套的原因。光学动捕的厂商就算气得牙齿痒痒,也只能在精确性和专业性上大做文章,却绝对不敢冒死大打价格战,因为他们的成本确实不可能降到那种程度。
然而诺亦腾还有更狠的杀招,没错,就是PERCEPTION NEURON:
从官网的截图来看,居然已经不到1万元人民币(实际国内售价应当在1万6左右)?这无疑是让众
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)
- 低余晖技术如何解决VR最大绊脚石晕动症?(06-04)