VR动捕技术如何成为VR产业飞速发展的香饽饽
的角度进行拍摄,把所有的照片送到当时还颇为庞大和笨拙的计算机中进行解算,再把计算得到的运动数据用于角色的数字化过程当中。这一流程几乎是全手工完成的,只是最后的数字化过程用到了全美国院校的60多台VAX 750(如下图),其复杂步骤和协同化的程度丝毫不亚于直接手绘临摹的程度,而最终的结果对于现在的我们来说似乎稀松平常。不过在那个年代,这样的创举还是引起了一阵轰动。
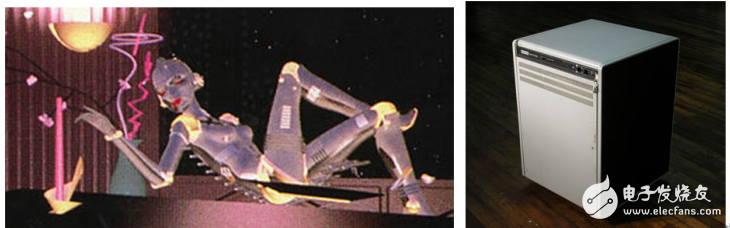
这之后的发展便是创造者们所喜闻乐见的,运动捕捉作为一个全新的理念和行业应用登上了历史舞台。比如《The Jim Henson Hour》中的实时木偶动作捕捉,表演者不是别人,正是一个泡沫塑料上镶嵌了传感设备的木偶。它的运动数据相对简单易于在计算机上立即呈现,而木偶本身的操控则由演员通过传统的方式实现。
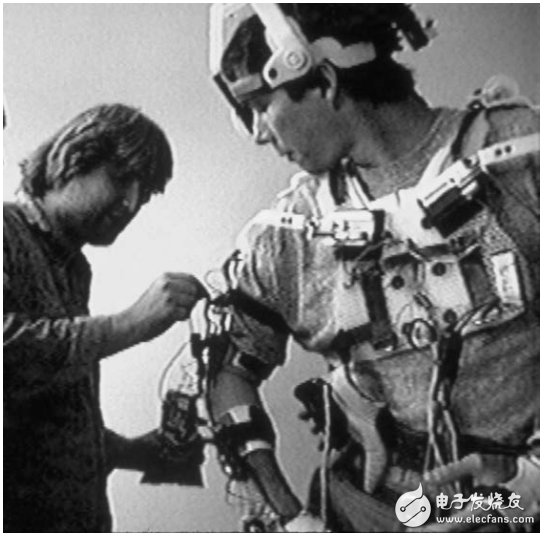
又比如1988年的Exoskeleton,它通过贴满演员身体的电位计来反馈实时的角度变化,然后传递给计算机进行演算和重映射。
这种方案的机械设施会制造相当让人难熬的噪音,并且因为电位计本身的环境敏感性,往往会受到空调等外界因素的干扰,产生巨大的识别误差。不过既然是在拍摄电影,这点影响因素还是不算什么的。只是时常出现跳变的角色动作,以及逐渐积累的运动误差,反而让电影的后期制作人员叫苦连连。很多误差也许看起来只是走路过程中的"咯噔"一下,或者脑袋发生了不到100毫秒的一个瞬移,但是要在最终版本的影片中将这些影响抹平,却需要耗费相当的人力和时间,有些看起来微小的问题甚至因为无法后期修复而被迫重新来过。
于是上帝说,要有光,这才有了光学动捕。
(3)光学动捕的桎梏
光学动捕的基本原理实际上与最早的Sexy Robot无异:使用一台计算机来控制多部数码摄像机(CCD)的实时摄制和数据回传演算;
这些摄像机负责捕捉任何地方的反射标记,并配有补光灯用于完善场景的光照环境;
这些反射标记通常被帖敷在表演者身体的关键关节之上,采用具备了很好的反射性能的材质。
多台相机从不同角度拍摄的图像被采集到计算机之后,通过视觉算法过滤无用的信息,再计算出每个标记点的空间位置,进而根据已知的骨骼信息得到关节的旋转角度。如下图就是通过同一个标记点在两台相机画面中的位置,解算出它的空间位置的简单数学表达:
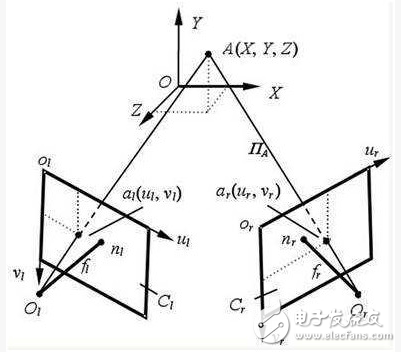
更多台相机的使用可以有限提高这种计算的精确度,以及避免某些角度下的标记点遮挡问题。
然而,用于光学动作捕捉的摄像机必须具备很高的拍摄速率,例如500-1000帧/秒,并且通常是采用全局快门(global shutter)方案,所有像元同时曝光以确保图像不会有运动模糊的现象。这种技术参数的摄像机显而易见不可能是普通的网络摄像头能够媲美的,其价格通常也是动辄数十万元一部,二三十台相机组成一个完整的动捕环境,再加上专业的标定和输出软件,这样一整套方案下来的咋舌价格自然也就不言而喻了。
基于光学的运动捕捉方案在如今的影视行业已经得到了广泛的应用,演员需要身着满是高反射率标记点的紧身衣服,手持同样扎上了标记点的怪异武器,在场景里闪转腾挪,摸爬滚打,而他的辛苦劳动则会立即反映到导演面前的预演画面(previz)当中,并且通过后期调整最终呈现为似幻似真的电影画面。

致力于光学动捕方案的国际厂商,无论Vicon,还是OpTITrack,都是默默地在影视行业耕耘多年,参与了无数商业大片的拍摄与制作(包括最新上映的《Everest》,中文译名"绝命海拔")。
因为光学标记点的卓越适配性,他们的装备早已具备捕捉人的全身关节,手指,以及面部表情的细微变化的能力,而不菲的价格对于那些财大气粗的影视制片商来说也并不遥不可及的成本。
而对于小成本的制作团队,或者希望把动作捕捉用在其它行业和家庭娱乐领域的初创者而言,这类专业设备也根本就是不需要多做考虑的一种阳春白雪而已。直到另一种方案的逐渐成熟,以及一场血腥的价格屠杀的来临。
(4)惯性动捕,异军突起的VR新星
一个完美无缺的运动捕捉系统应当具备以下特质:
实时地跟踪无限个关键点的信息,不受到空间和时间因素的限制,能够以足够高的频率进行数据采样和传输,可能的话还要保证最终结果的误差最小。
光学动捕的原理和相机技术参数可以确保它能够追踪足够多的关键点,并且以很高的频率进行图像采集和处理;
而随着现代计算机硬件水平的不断提高,实时地进行每个标记点的位置计算与动画重映射也是完全可以做到的事情;
最终结果如果产生一定的误差,也可以在下一帧图像识别的过程中得到纠正——这是因为通
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)
- 低余晖技术如何解决VR最大绊脚石晕动症?(06-04)