轮式移动机器人伺服控制系统设计
可以保持的电机作为腿部关节使用。经过我初步估计电机转速不是很大,如果使用直流电机,由于转速和力矩的影响,需配置减速器,且不能控制角度。而如果使用步进电机,需配置驱动器。为满足系统的控制要求,考虑到经济性等,我准备采用Dynamixel系列AX-12舵机它是机器人专用的伺服电机。它不但能精确控制角度,作为关节角度控制;也可以通过软件设置为无限旋转模式,作为车轮使用。
3.3AX-12数字舵机概述及特性
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20mS,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。AX-12舵机是一款智能化、模块化的动力装置,主要由一个微处理器、一个精确的直流电机、齿轮减速器、位置传感器、温度传感器以及具备通讯功能的控制芯片等组成,其内部机械结构和电路控制如图4所示:

图4.1舵机内部结构和控制图
AX-12数字舵机作为舵机用时,最大转角为300度,作为电机用时可以自由旋转,应用范围广;采用数字信号控制,控制起来更方便;每个舵机都拥有唯一的ID号,采用网络驱动模式、Daisy总线连接方式,可以多个网状串连控制,连接方便。它的具体参数如表1.1所示。
表1.1舵机具体参数
项目参数项目参数
重量55g位移角度0-300°无限旋转
减速比1/254最小角度0.35°
工作电压7VDC-12VDC通讯半双工异步串行通信
工作温度-5-85摄氏度波特率7343bps-1Mbps
最大电流900mA指令包数字信号
输入电压7V10V物理连接TTL多通道(daisy总线)
最大扭矩12(Kgf?cm)16.5(Kgf?cm)材料工程塑料
转速0.269(秒/60°)0.196(秒/60°)反馈位置、温度、负载、电压等
由于AX-12内部配有一个ATmega8微处理器,用来接收控制器发送的数据包,通过相应的处理后给伺服电机发送PWM信号来控制电机的起停。因此,控制舵机实际上是去控制ATmega8舵机的状态和参数都存储在ATmega8的RAM和EEPROM相应的地址里,对舵机进行控制也就是对舵机的相应地址读和写数据的过程。
5AX-12舵机通信协议
AX-12数字舵机不像一般的R/C伺服电机(舵机)使用PWM控制,它的控制信号为数字信号,主控制器和舵机采用TTL-Daisy总线的连接方式、半双工异步串行通讯协议((8位数据位、1位终止位,无奇偶校验位)。主控制器通过发送和接受数据包的形式来控制舵机,有两种数据包:一个是指令包,这是从主控制器发给舵机的指令;另一个是状态包,这是舵机返回给主控器的。如果主控器向ID为N的舵机发送指令包,则只有该ID的舵机会反馈相应的状态并且执行需要的动作。控制原理图如图5所示:
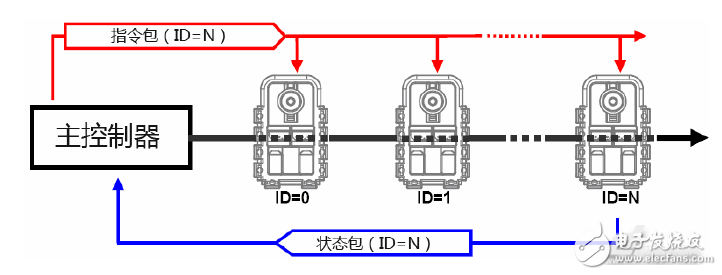
图5舵机控制原理图
6结束语
本文设计了一种轮式移动机器人运动控制系统:即基于伺服控制的移动机器人运动控制系统。本系统采用数控插补技术来跟踪轨迹,具有跟踪精度高等特点。选择了专门用于电机控制的DSP芯片,简化了设计,提高了模块的可靠性,并为今后控制算法的升级留有足够的空间。本文采用的移动机器人规划路径的航迹推算数学模型,它不同于传统的只对直线和圆弧离散,而对一次、二次曲线跟踪路径都可以作离散化处理。运动控制系统采用主从式控制结构,即由主机完成复杂计算,将处理后的数据传递给从机,由从机完成对小车本体的控制,方便地实现了步进电机控制。由从机执行的运动控制器,成本低,功能强,使用方便,而具有十分广阔的应用前景。
- 基于ATmega128单片机的自动投切开关电源设计(03-27)
- 一种迷你数控雕刻机系统的设计方案(02-06)
- ATmega128的16路遥控单元电路分析(02-09)
- 便携式移动机器人手持监控系统设计(02-27)
- 移动机器人感测系统电路设计(08-02)
- 基于MCU的室外移动机器人组合导航定位系统(09-07)