轮式移动机器人伺服控制系统设计
绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
麦克纳姆外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。这样的特殊结构使得轮体具备了三个自由度:绕轮轴的转动和沿辊子轴线垂线方向的平动和绕辊子与地面接触点的转动。这样,驱动轮在一个方向上具有主动驱动能力的同时,另外一个方向也具有自由移动(被动移动)的运动特性。轮子的圆周不是由普通的轮胎组成,而是分布了许多小滚筒,这些滚筒的轴线与轮子的圆周相切,并且滚筒能自由旋转。当电机驱动车轮旋转时,车轮以普通方式沿着垂直于驱动轴的方向前进,同时车轮周边的辊子沿着其各自的轴线自由旋转。图2为麦克纳姆轮的各结构和运动参量。

图2麦克纳姆轮运动参量的定义
4伺服控制系统设计
移动机器人的运动控制系统是机器人系统的执行机构,对系统精确地完成各项任务起着重要作用,有时也可作为一个简单的控制器。构成机器人运动控制系统的要素有:计算机硬件系统及控制软件、输入/输出设备、驱动器、传感器系统,它们之间的关系如图3所示。
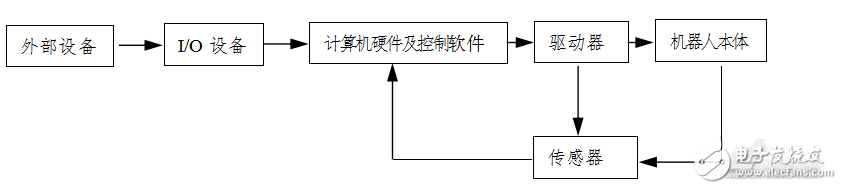
图3机器人控制系统构成要素
4.1移动机器人控制系统的研究
(1}移动机器人体系结构。利用分布式智能结构可以提高移动机器人的实时性和鲁棒性,并减小移动机器人的体积和自重,使机器人更加轻便、灵活。
(2)控制系统中的传感器技术。移动机器人传感器技术主要是对机器人自身内部的位置和方向信息以及外部环境信息的检测和处理。获取真实有效的环境信息,是控制系统进行决策的保证。通常采用的传感器分为内部传感器和外部传感器。内部传感器主要包括:编码器、线加速度计、陀螺仪、磁罗招等。外部传感器主要包括:视觉传感器、超声波传感器、红外传感器、接触和接近传感器等。
(3)控制系统的多传感器信息融合技术。多传感器信息融合是把分布在不同位置的传感器所提供的局部环境的不完整信息加以综合,消除多传感器之间可能存在的冗余和矛盾,以降低其不确定性,形成对系统环境的相对完整一致的感知描述,从而提高智能系统决策、规划的快速性和正确性,同时降低决策风险。
(4)控制系统的开发技术。重点研究开放式、模块化控制系统。移动机器人控制器结构的标准化,以及网络式控制器成为研究热点。编程技术进一步提高在线编程的可操作性,离线编程的人机界面更加友好、自然语言化编程和图形化编程的进一步推广也是今后研究的重点。
(5)运动控制技术。机器人运动必须足够快,受控并安全,避开静态和动态的障碍。轨迹跟踪、路径跟踪、点镇定是移动机器人运动控制的三个基本问题;
(6)控制系统的智能化技术。控制系统的智能特征包括知识理解、归纳、推断、反应和问题求解等内容。涉及领域包括图像理解、语音和文字符号的处理与理解、知识的表达和获取等方面。智能控制方法常使用神经网络和模糊控制方法,但前者往往伴随着对存储容量、运算速度的较高要求,这与移动机器人高速高精度运动控制的要求存在一定差距,故模糊控制方法在机器人控制方面有着较大的优势。
根据移动机器人控制系统的设计要求,结合本机器人的系统功能和特点,按照模块化的设计思想,提出了机器人控制系统总体设计方案。如下图所示:
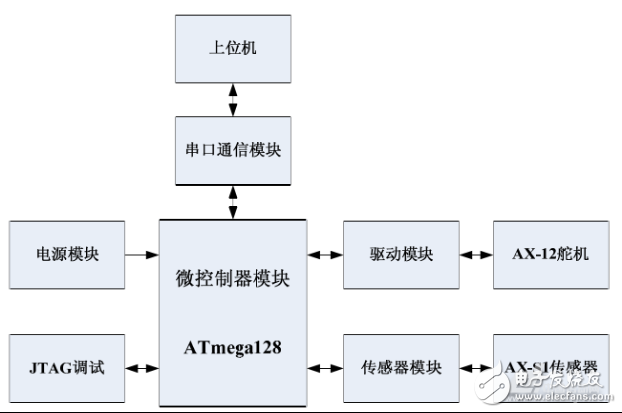
图4控制系统总体方案
控制系统总体设计方案
该方案是以ATmega128芯片为核心,分模块化设计,各子模块功能为:
(1)微处理器模块:是控制系统的核心,包括微控制器及其相关外围电路主要进行各种信息、数据的处理,协调系统中各功能模块完成预定的任务;
(2)驱动模块:控制机器人系统中的舵机和传感器模块预定的任务;实现舵机速度和位置的控制,完成前进、后退、直行、转弯、避障、抓取等动作;
(3)传感器模块:有速度、位置、距离、声音等传感器,主要负责移动机器人移动过程中的障碍物、声音等检测;
(4)电源模块:负责整个移动机器人的电源供给,使系统能离线运动,主要由12V蓄电池及相关调压稳压电路组成;
(5)串口通信模块:根据RS232通信标准与上位机进行串口通信;
(6)JTAG调试:可以实现在线编程、调试仿真。
3.2机器人的驱动系统
目前,爱机器人的运动控制中较为常见的有直流电机、步进电机和舵机。对于我的课题来说,一个能控制速度的电机作为麦克纳姆轮使用,也需要一个能精确可控制角度且
- 基于ATmega128单片机的自动投切开关电源设计(03-27)
- 一种迷你数控雕刻机系统的设计方案(02-06)
- ATmega128的16路遥控单元电路分析(02-09)
- 便携式移动机器人手持监控系统设计(02-27)
- 移动机器人感测系统电路设计(08-02)
- 基于MCU的室外移动机器人组合导航定位系统(09-07)