便携式移动机器人手持监控系统设计
引言
目前,便携式移动机器人全自主控制方式尚不成熟,其监控系统普遍采用人在环半自主控制方式设计。为满足携带、系统小型化、嵌进式的结构特点,故设计便携式移动机器人手持监控系统,并将其用于履带结构便携式移动机器人实验平台。
功能设计
手持监控系统对便携式移动机器人起到监视与控制的全局性作用。手持监控系统可划分为视频图像监视模块、状态信息监测模块、远控指令模块、无线通讯模块、数字与图交互模块、全局路径规划模块六大功能模块(见图1)。
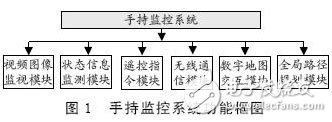
视频图像监视模块对便携式移动机器人所处环境进行视频监视;状态信息监测模块对机器人自身状态信息的监测;远控指令模块实现基本的运动指令编码以及发送;无线通讯模块实现运动指令、状态信息、视频信号等数据的无线传输;数字舆图交互模块实现环境地理信息的数字化显示及人机交互功能;全局路径规划模块实现点到点的最优路径搜索功能。
硬件系统
手持监控系统的硬件系统可划分为若干模块,各个模块实现自身相对独立的功能。
硬件结构与接口
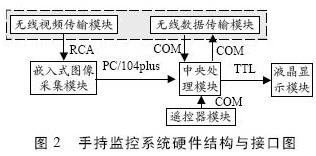
手持监控系统硬件系统采用基于嵌进式系统的PCI 总线的PC/104plus 总线结构,分为无线通讯、嵌进式图像采集、中心处理、远控器、液晶显示等五大模块。无线通讯模块又划分为无线数据传输和无线视频传输模块。无线数据传输模块实现运动指令、状态信息等窄带数据无线传输;无线视频传输模块实现视频图像信号等宽带数据无线传输。
硬件系统各模块通过接口实现信息交换与数据共享。中心处理模块通过PC/104plus 总线与嵌进式图像采集模块接口,实现模块之间视频图像数据的传输。中心处理模块与无线数据传输模块及远控器模块通过串口连接。中心处理模块通过TTL接口与液晶显示模块连接。嵌进式图像采集模块与无线视频传输模块通过RCA 接口实现复合视频信号的传输(见图2)。
硬件模块实现
无线数据传输模块采用微功率无线数据传送单元实现。嵌进式图像采集模块采用PC/104plus总线结构的嵌进式图像采集卡实现。中心处理模块采用PC/104plus总线结构的单板机实现。远控器模块通过自行设计电路板实现按键扫描、指令编码以及串口发送等功能。液晶显示模块采用小型彩色液晶屏实现。以上各硬件模块实现符合手持设备小型化、便携式的硬件要求。
软件系统
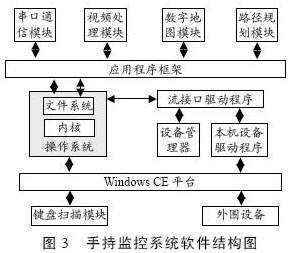
手持监控系统的软件系统选用Windows CE(WinCE)作为嵌进式操纵系统平台,监控系统软件包括:操纵系统定制、设备驱动程序开发、应用程序。应用程序又分为:键盘扫描模块、串口通讯模块、视频处理模块、数字舆图模块、路径规划模块五大模块(见图3)。
操纵系统定制
操纵系统定制主要根据系统需要建立操纵系统平台并对其进行相应的配置。通过平台裁剪工具Platform Builder(简称PB)完成。
设备驱动程序开发
WinCE的驱动程序分为:本机设备驱动程序和流接口驱动程序[5]。本机设备是指集成到目标平台的设备,其驱动程序由原设备制造商(OEM)提供。流接口驱动程序是指连接到WinCE平台的外部设备驱动程序,由用户自行开发。流接口驱动程序把外部设备看作文件系统的特殊文件,通过文件读取函数间接地访问外部设备。
嵌进式图像采集卡驱动程序分为三部分:
(1) 内核部分
实现中断服务例程(ISR)。内核函数实现了物理中断号与逻辑中断标识之间的映射关系,并调用中断服务例程,中断服务例程在中断发生后向内核返回中断逻辑标识。
(2) 驱动程序部分
实现WinCE 流接口驱动模型所需要的文件操纵接口函数,包括:采集卡初始化、数据读取和采集卡句柄封闭。
(3) 应用程序部分
通过调用设备注册函数将嵌进式图像采集卡中断驱动程序加载到系统内存,并根据采集卡初始化参数设置修改WinCE系统注册表文件。
应用程序设计
键盘扫描模块及串口通讯模块单片机程序在单片机集成开发环境uVision2下用C语言开发外,其余模块均在EVC(Windows CE Embedded VisualC++)下开发。
(1) 键盘扫描模块
键盘扫描模块主要实现单片机对薄膜键盘的按键识别及键值显示功能。薄膜键盘属于行列式非编码键盘,按键的识别通常采用逐行扫描查询法实现。程序采用软件延时的方法处理抖动。键值显示则通过单片机对液晶屏串行数据口编程实现。
(2) 串口通讯模块
串口通讯模块主要实现单板机与单片机之间的串行数据通讯功能。该模块包括单板机串口通讯程序、单片机串口通讯程序、串口通讯协议三部分。
① 单板机串口通讯程序。由于WinCE不支持串口通讯控件的使用,所以
- 微软高管解密VR计划 Windows10 VR设备明年上市(10-04)
- 基于Dragonboard 410c开发板windows平台上搭建kinect运行环境(02-27)
- Linux 和 Windows 操作系统中 Vivado 结果是否可重复?(09-09)
- 怎样构成电池管理系统(08-08)
- EMI滤波器的PSpice辅助设计(11-07)
- OGS能否真正成为触控面板主流的关键问题(09-26)