仿人足球机器人目标定位技术与追踪算法改进
的颜色标号。为了减少光照造成的影响,先让足球机器人多次进行场地图像采集,然后对所拍摄到像素点的Y、U、V的值进行统计,进而选择阈值。
在进行机器人颜色标定及建立色彩模型的过程中,分析数据发现环境照明度的变化对U和V值的分布影响极小,可认为U和V值并不随着光照条件的变化而变化,色彩校正表一般来说是不需要重新生成的,仅当光线发生较大变化时仍然需要重新标定。
下图为摄像头采集到的图像颜色分离及归类处理过程流程:
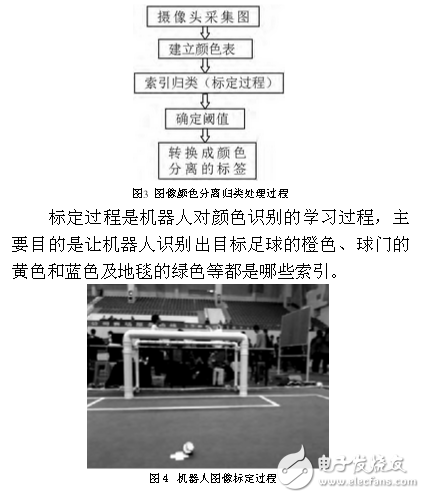
在机器人识别的过程中,还加入了边缘检测方法,主要通过判断目标球是否为圆形及判断球门的长和高是否满足一定的比例,还有限制机器人识别较远位置的足球的能力,最终识别并确定目标物体,以保证识别的准确性。
3 球的定位
球的定位在机器人的足球比赛中是至关重要的一个环节,也是机器人所应当具备的最基本的功能,
因为不论进攻、防守都是以球为中心的对抗,所以做好足球机器人对球的定位具有重要的意义。
iKid机器人视觉系统是摄像头位于机器人头部随着机器人头部及身体运动的单目系统。iKid机器人原采用的是三角形定位法,经场地调试认为该算法对机器人的目标识别的精度不能很好地满足比赛需求,容易产生失误。因此实现精确定位的关键在于图像坐标系与机器人坐标系之间的转换。????
单目视觉系统采集到的是图像的二维信息,因此需要限制目标物体所在的平面,最终确定目标物
体的空间位置。采用小孔成像模型建立机器人目标

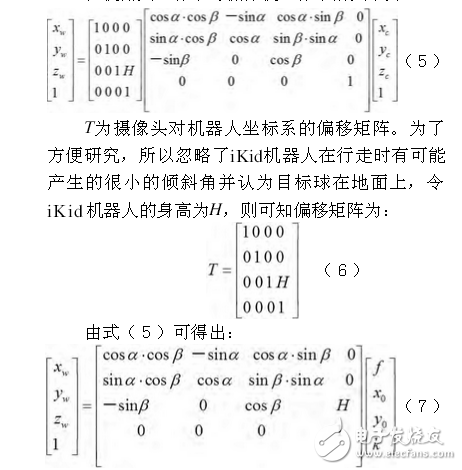
再根据小孔成像模型所得到了公式(3)联立计算可得:
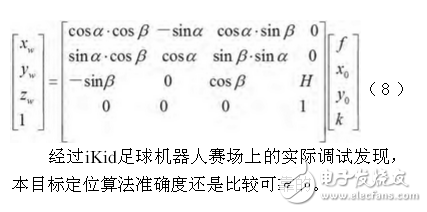
(8) (参见右栏)
其中,k为摄像头采集到的图像的放大系数。
4 目标的追踪算法
为了能够提高仿人足球机器人在赛场上找球的效率,进行更准确快速的目标定位,本文设计采用Camshift算法进行目标的追踪。根据以往的比赛经验,iKid机器人在找球的过程中,一旦由于某些原因丢失了目标,系统将命令机器人重新全方位搜索,需要重新对环境进行识别和判断,在赛场上,因来回找球浪费大量时间对比赛十分不利,加入目标追踪算法会大大提高效率。
4.1 Camshife算法基本原理
Camshife算法是根据摄像头所采集到的视频图像,利用目标颜色的特征在连续的视频图像中找到移动的目标,进而准确判断出其位置和大小。在下一帧的所获得的视频图像信息中,利用前一帧的大小位置信息来初始化搜索范围,这样可以大量节省
寻找目标的时间,进而实现对目标的连续追踪。
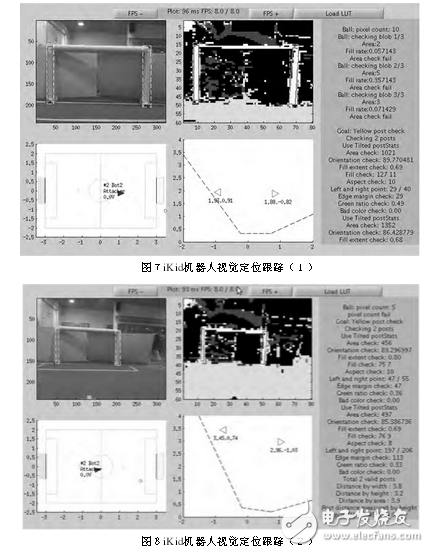
4.2 目标定位与追踪实验结果
以iKid足球机器人为实验平台,在比赛场地中进行目标球的标定与识别,结果如图7、8所示。
5 整体结果
经实际调试及赛场经验数据记录,算法改进后,iKid机器人在视觉识别和定位方面有了较大的提高。像素表的建立使机器人能够快速查表滤除杂色,提高了识别的准确度;加入目标追踪算法实现了iKid机器人对目标的追踪,整体完成了项目预期的目的。
在仿人机器人调试中还遇到下列问题,相应的解决方法如下:
(1)摄像头采集图像时,受光线影响较大,很多相近的颜色难以区分,选择阈值较为困难。改进措施:对机器人摄像头参数进行调整,对光线进行补偿,得到较好的图像。
(2)在操作者对视觉进行标定时,需要采集全场各个角度的图像,图像采集标定时较慢。改进措施:利用上层决策,使机器人的摄像头自主旋转,扫描全场来采集图像,这样避免了死角出现,也减少了人为采集图像的时间,提高了效率。
参考文献:
[1] 胡丽花.基于视觉的类人足球机器人目标定位算 法设计[D].杭州:浙江理工大学,2011.
[2] 王冉.基于Camshift算法的运动预测目标跟踪改 进算法研究[D].济南:山东大学,2012.
[3] 邱雪娜.基于视觉的运动目标跟踪算法及其在移 动机器人中的应用[D].上海:华东理工大学,2011.
[4] 马昕.基于单目视觉的移动机器人目标识别与定 位[D].济南:山东大学,2011.11.
[5] 许家铭,谢仑.一种仿人足球机器人目标定位与追踪算法[J].华中科技大学学报(自然科学版), 2011,39(S2):243-245,258
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)