仿人足球机器人目标定位技术与追踪算法改进
对于仿人足球机器人来说,视觉功能是极其重要的。在足球机器人的各种关键技术中,机器视觉是应用范围最广,最为基本的技术之一。移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。仿人机器人视觉系统的识别与定位算法也是目前的研究热点,目标的实时识别与定位是足球机器人在足球赛中精确踢球的前提。文章主要是针对目前足球机器人在视觉系统上所存在的问题进行了颜色模型建立及目标定位算法的改进,加入了目标追踪算法,确保目标识别与定位的准确。在iKid足球机器人上进行试验并调试,试验结果具有较好的实时性和准确性。
引言
在RoboCup仿人足球机器人比赛中,视觉是其获得外界信息的主要途径,机器人通过摄像头去采集周围环境的图像信息,进而对环境进行认知,对目标进行识别。在机器人足球比赛中,球场中的信息包括蓝色和黄色的球门、角球柱、橙色的球等,足球机器人需要对其所获取到的信息进行识别及判断进而做出相应的决策,因此仿人足球机器人识别的准确性和实时性对于比赛的结果来说是至关重要的。本次创新项目研究主要是基于iKid机器人的视觉系统。
根据场地调试经验发现机器人视觉模型及定位追踪算法中存在以下不足:1)当周围环境有稍微变化或者环境中有与目标物体颜色相接近的物体时,对目标识别标定结果有很大的影响;2)由RGB到HSV的转换影响系统的实时性;3)目前足球机器人的定位是利用坐标之间的变换及三角形成像规律算法,调试中发现这种定位算法在精度上存在很大问题;4)当机器人距离目标物体较远时,对目标定位不准确,定位误差较大。
针对于以上问题,本次项目中,本文提出改进原有机器人的视觉模型、目标定位算法等,并加入追踪算法,使iKid机器人视觉系统更加准确高效。
1 机器人系统结构
此项目研究的平台是iKid仿人足球机器人。iKid机器人共有20个自由度,头部有仰俯和摇摆两个自由度,腿部有6个自由度,手臂处分别有3个自由度。其头部采用的是USB网络摄像头Logitech C905,核心板型号为Cortex-A8,所选用的舵机型号为韩国Robots公司的RX28和RX64。
在智能决策系统硬件方面,iKid机器人采用Cortex-A8核心板,其主处理器为Samsung S5PV210。此外,S5PV210内部集成了高性能图形引擎,同时也包含了图像硬解码功能,能够流畅运行Android、Linux等操作系统。
iKid仿人足球机器人的图像采集器选择的是USB2.0网络摄像头Logitech C905,它能够以30帧/秒的速度传送分辨率为640×480的压缩图像,摄像头的采集频率可达人眼的频率,且能在当前比赛场地的坐标位置看到场地任意位置的目标。摄像机还具备可变白平衡、可变增益等自动调节功能,能够使机器人在不同的光照情况下保持良好的图像质量。该摄像头支持RGB和YUYV格式的图像,支持多分辨率。
在iKid机器人决策方面,采用的是运动控制系统与智能决策系统分离的分布式系统,经Wi-Fi传送的信息及摄像机采集到的图像信息处理后使机器人做出相应的决策,控制舵机做出相应的运动,使机器人做出相应的运动。
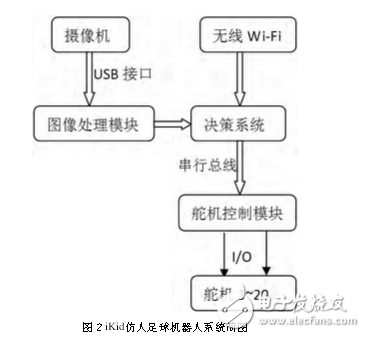
具体系统简图如图2所示。
图2 iKid仿人足球机器人系统简图(参见右栏)整体来讲,iKid足球机器人的硬件平台由其视觉系统、决策系统及运动控制系统构成。
2 色彩模型的改进
2.1 色彩模型的选取
彩色图像的方式模型有多种,较为常用的是RGB模型、HSV模型和YUV模型。RGB模型受光线的影响较大,而在比赛中,稍微移动一下比赛场地就可能受到影响,进而需要重新标定。YUV模型中,Y项表示的是光照强度,也就是明亮度(Luminance),U和V表示的是色度(Chrominance)。其中亮度信号Y
和色度信号U、V的信息是相互独立的,关联性小,同时降低彩色分量的分辨率也不会明显对图像的质量造成影响。
YUV色彩模型是从RGB模型经线性变换而得到的,转换公式如下:
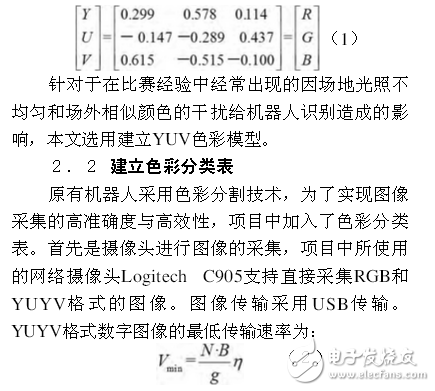
其中,N为图像分辨率,B为位数, r为帧速率。为了保证足球机器人在赛场上能较快地进行图像获取和处理,通过多次试验选择将采集到的图像以RGB的压缩格式通过图像处理器的硬解码功能转换为YUYV格式图像。每张图片能够用8ms完成格式转换。YUYV色彩模型是抽样格式,即为YUV4:2:2,保留Y像素,UV在水平空间上每两个像素采样一次。
其次建立像素表,像素表表示一个图像的YUV与颜色表中的数据相互映射的关系。原始的YUV为三组8位数据,将三组数据并列建立表的索引便可发现每组数据都能被索引到,即通过某一处的像素点Y、U、V的值在表中进行索引得出对应像素点
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)